Motores EV: Tipos, estructuras y análisis de rendimiento
¿Qué motor impulsa su vehículo eléctrico? Desde los motores asíncronos de CA hasta los motores síncronos de imanes permanentes, pasando por los motores de reluctancia conmutada, cada tipo ofrece ventajas e inconvenientes únicos. Este artículo explora las estructuras, los principios y las aplicaciones de estos tipos de motores clave, ayudándole a comprender cómo afectan al rendimiento y la eficiencia de los vehículos eléctricos. Sumérjase y descubra qué motor podría impulsar su próximo vehículo.
Basándose en los requisitos de rendimiento fundamentales del motor de accionamiento para vehículos de nueva energía, los tipos de motores de accionamiento utilizados habitualmente se dividen en tres categorías principales: Motores asíncronos de CA, motores síncronos de imanes permanentes y motores de reluctancia conmutada.
En la actualidad, cada modelo de automóvil equipado por diversas empresas automovilísticas utiliza distintos tipos de motores de propulsión.
Por lo tanto, para elegir el tipo de motor para un vehículo de nueva energía, es importante comprender la estructura, el principio de funcionamiento y las ventajas y desventajas del motor de propulsión.
I. Motor asíncrono de CA
1. Estructura del motor asíncrono de CA
El motor asíncrono de CA, también conocido como motor de inducción, consta principalmente de un estator, rotor, eje del motor, cojinetes delantero y trasero, cubierta final, sensor de posición, sensor de temperatura, mazo de cables de baja tensión y mazo de cables de alimentación de alta tensión.
El estator está formado por el núcleo de hierro del estator y el devanado trifásico; el rotor suele utilizar un rotor de jaula de ardilla, que incluye el núcleo de hierro del rotor y el devanado de jaula de ardilla.
En función de la potencia del motor, se elige entre los métodos de refrigeración por agua o por aire. (Figura 1)
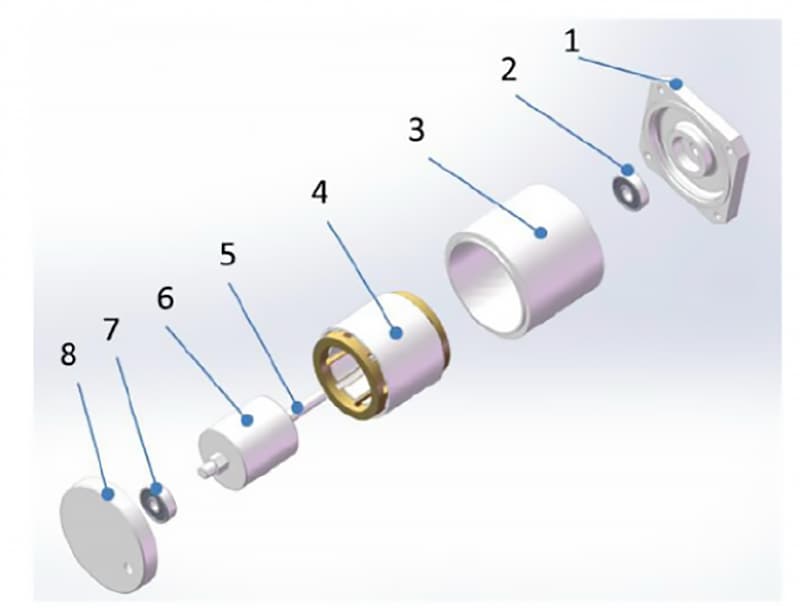
Figura 1 Esquema estructural del motor asíncrono de CA
1- Tapa frontal 2- Rodamiento delantero 3- Carcasa del motor 4- Rotor de jaula de ardilla 5- Eje motor 6- Estator 7- Cojinete trasero 8- Tapa trasera 9- Sensor de posición 10- Tapa de mantenimiento del sensor
2. Principio de funcionamiento del motor asíncrono de CA
(1) Principio de funcionamiento del motor asíncrono de CA
1) El estator proporciona un campo magnético giratorio. Para proporcionar par, el motor asíncrono de CA necesita hacer pasar corriente alterna trifásica a través de la bobina del estator, creando un campo magnético en rotación continua (con una velocidad de rotación del campo magnético de ns).
El motor asíncrono de CA requiere que los devanados trifásicos del estator sean simétricos y que el núcleo de hierro del estator esté separado 120 grados eléctricos. La corriente que pasa por el bobinado trifásico simétrico también debe ser simétrica, con el mismo tamaño, frecuencia y diferencia de fase de 120 grados. La velocidad de rotación del campo magnético giratorio viene dada por la ecuación (1).
ns=60f/p (1)
En esta ecuación, ns es la velocidad de rotación del campo magnético giratorio (también conocida como velocidad síncrona), r/min; f es la frecuencia de la corriente alterna trifásica, Hz; p es el número de pares de polos.
Para un motor de accionamiento diseñado y puesto en producción, el número de pares de polos es fijo, por lo que el factor que determina la velocidad de rotación del campo magnético es la frecuencia de la corriente alterna trifásica. Como la frecuencia de la red eléctrica en nuestro país es f=50Hz, existe una relación lineal entre la velocidad del motor y el número de pares de polos. (Figura 2)
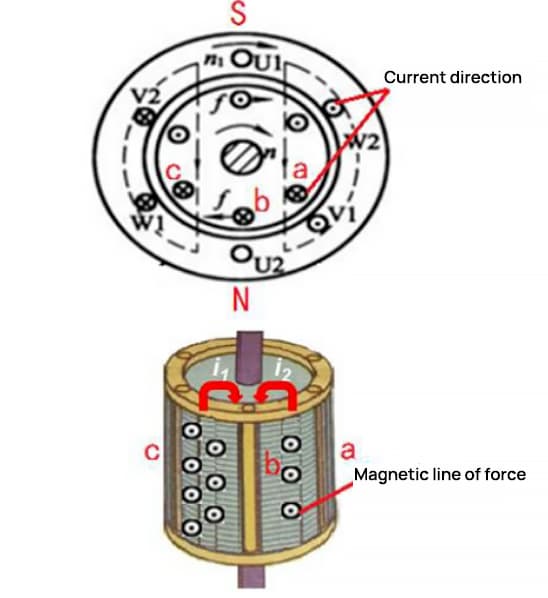
Figura 2 Diagrama del campo magnético giratorio de los devanados bipolares del estator
2) El rotor de jaula de ardilla induce corrientes parásitas. Como el estator proporciona un campo magnético giratorio, se induce una corriente parásita en el conductor del rotor de jaula de ardilla, como se muestra en la figura 3.
Figura 3 Corriente de Foucault en los devanados del rotor de la jaula
En la zona magnética entre los conductores c y b del bobinado de jaula de ardilla, existen líneas de fuerza magnéticas hacia el exterior, y estas líneas de fuerza magnéticas se potencian bajo la acción del campo magnético giratorio.
Por lo tanto, se inducirá una corriente parásita i1 en los conductores c, b; del mismo modo, el debilitamiento de las líneas de fuerza magnéticas en la zona entre el conductor a y el conductor b inducirá una corriente parásita i2 en el conductor.
La corriente en el conductor b, bajo la acción del campo magnético giratorio del estator, hará que el conductor b del bobinado de jaula de ardilla esté sometido a una fuerza electromagnética, provocando así que el rotor genere un par electromagnético y comience a girar. El rotor giratorio alcanza gradualmente al campo magnético giratorio, girando a una velocidad n ligeramente inferior a la "velocidad síncrona ns" del campo magnético.
Este fenómeno, en el que la velocidad de rotación n del rotor es ligeramente inferior a la velocidad ns del campo magnético del estator, se denomina deslizamiento del rotor. Este deslizamiento asíncrono permite al conductor del rotor de jaula de ardilla cortar continuamente las líneas de fuerza magnéticas, produciendo corrientes parásitas inducidas.
Por consiguiente, en el rotor, la energía eléctrica se convierte en energía mecánica, lo que garantiza un rendimiento externo continuo.
(2) Principio de generación de energía en motores asíncronos de CA
Según la Ley de inducción electromagnética de Faraday, cuando una sección del conductor de un circuito cerrado atraviesa las líneas del campo magnético en movimiento, se genera una corriente inducida dentro del conductor, y la fuerza electromotriz generada se conoce como fuerza electromotriz inducida.
En un motor asíncrono de CA, cuando el motor se utiliza como generador, el estator se energiza con una corriente trifásica para proporcionar el campo magnético, y el devanado del rotor proporciona el conductor.
Cuando una fuerza mecánica externa, como el eje de transmisión de un automóvil, acciona el eje del rotor, haciendo que éste se mueva, si la velocidad del rotor es superior a la velocidad síncrona del campo magnético giratorio del estator, el motor asíncrono de CA actúa entonces como un generador.
La dirección del rotor que corta el campo magnético giratorio es opuesta a cuando funciona como motor de accionamiento, por lo que la dirección de la fuerza electromotriz inducida del rotor también se invierte.
Durante el proceso de generación de energía, el rotor del motor experimenta un par electromagnético opuesto a la fuerza de arrastre externa, lo que provoca una disminución de la velocidad del rotor.
3. Ventajas, desventajas y aplicaciones de los motores asíncronos de CA
Los motores asíncronos de CA destacan por proporcionar un par de salida ajustable en un amplio rango, capaz de aumentar forzosamente el par de salida en periodos cortos durante la aceleración o el ascenso. Los vehículos eléctricos propulsados por motores síncronos de imanes permanentes suelen emplear mecanismos de caja de cambios adicionales para aumentar el par con el fin de mejorar la velocidad.
Sin embargo, los motores asíncronos de CA presentan varios inconvenientes. Debido a la excitación unilateral, requieren mayores corrientes de arranque y más corriente por unidad de par producido. El estator aloja corrientes de excitación reactivas, lo que se traduce en un mayor consumo de energía que los motores síncronos de imanes permanentes, con un factor de potencia rezagado.
Las condiciones de sobrecarga son frecuentes en los accionamientos de gran potencia. Su estructura relativamente compleja exige una gran experiencia en tecnología de control, lo que encarece su fabricación, y su densidad de potencia es comparativamente menor.
En la actualidad, los motores asíncronos de CA se utilizan habitualmente como motores de propulsión en los vehículos eléctricos desarrollados en Estados Unidos.
II. Motor síncrono de imanes permanentes
1. Estructura del motor síncrono de imanes permanentes
La estructura de un motor síncrono de imanes permanentes consta de un estator, un rotor, un eje de motor, cojinetes delantero y trasero, una tapa, un canal de agua de refrigeración, un sensor de posición, un sensor de temperatura, un mazo de cables de baja tensión y un mazo de cables de alimentación.
El estator está formado por el núcleo de hierro del estator y devanados trifásicos; el rotor consta de polos de imanes permanentes y un núcleo de hierro, con el núcleo de hierro formado por apilados chapas de acero al silicio.
La disposición de los imanes permanentes en el rotor incluye principalmente rotores de imanes permanentes montados en superficie, incrustados en superficie e interiores, siendo los rotores de imanes permanentes interiores los más utilizados en los motores de nueva energía. (Figura 4)
Figura 4 Diagrama esquemático de un síncrono de imanes permanentes estructura motriz
1- Tapa frontal 2- Cojinete delantero 3- Carcasa del motor 4- Estator 5- Eje motor 6- Rotor de imán permanente integrado 7- Cojinete trasero 8- Tapa Final Trasera (Sensor de Posición Incorporado)
2. Principio de funcionamiento del motor síncrono de imanes permanentes
(1) Principio de accionamiento del motor síncrono de imanes permanentes
El campo magnético giratorio lo proporciona el estator, producido de la misma manera y a la misma velocidad que un motor asíncrono de CA. Los polos magnéticos son suministrados por los imanes permanentes del rotor.
Así, el campo magnético giratorio generado por el estator forma un circuito con los polos del imán permanente del rotor y el núcleo de hierro. Siguiendo el principio de mínima reluctancia magnética, es decir, que el flujo magnético se cierra siempre por el camino de menor resistencia magnética, el rotor es arrastrado a la rotación por la fuerza electromagnética del campo giratorio.
En consecuencia, el rotor de imanes permanentes gira sincrónicamente con el campo magnético giratorio generado por el estator, impulsando así la rotación del eje del motor.
(2) Principio de generación de energía del motor síncrono de imanes permanentes
Siguiendo la ley de inducción electromagnética de Faraday, una parte del conductor del circuito cerrado es alimentado por los devanados trifásicos del estator, mientras que el campo magnético lo proporcionan los imanes permanentes del rotor.
Cuando un par externo impulsa el rotor a girar, genera un campo magnético giratorio que corta parte de los conductores de los devanados trifásicos del estator e induce una corriente trifásica simétrica.
En este punto, la energía cinética del rotor se convierte en energía eléctrica, y el motor síncrono de imanes permanentes funciona como un generador.
3. Ventajas, desventajas y ámbito de aplicación del motor síncrono de imanes permanentes
Las ventajas de un motor síncrono de imanes permanentes son su pequeño tamaño, peso ligero, alta densidad de potencia, menor consumo de energía, menor aumento de temperatura y mayor eficiencia en comparación con los motores asíncronos.
Puede diseñarse como motor estructurado de alto par de arranque y gran capacidad de sobrecarga en función de las necesidades.
El motor síncrono de imanes permanentes se sincroniza estrictamente y tiene un buen rendimiento de respuesta dinámica, adecuado para el control de frecuencia; el par y la velocidad del motor pueden ajustarse en un amplio rango alterando la corriente y la frecuencia.
Sin embargo, el material magnético permanente utilizado en los motores síncronos de imanes permanentes suele ser material magnético fuerte de neodimio, hierro y boro, que es relativamente frágil y puede fracturarse bajo vibraciones intensas.
Además, el uso de material de imanes permanentes en el rotor puede provocar decaimiento magnético en el funcionamiento del motor y situaciones de sobrecalentamiento, lo que se traduce en una disminución de la potencia.
Actualmente, los motores síncronos de imanes permanentes se utilizan ampliamente en los motores de vehículos de nueva energía, y los mercados de nueva energía de Asia y Europa utilizan principalmente motores síncronos de imanes permanentes como motores de nueva energía.
III. Motor de reluctancia conmutada
1. Estructura del motor de reluctancia conmutada
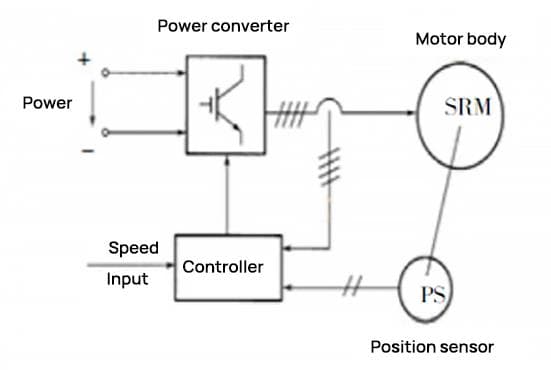
El motor de reluctancia conmutada (SRM) es un motor mecatrónico típico, también conocido como "sistema de accionamiento de reluctancia conmutada". El motor incluye principalmente cuatro componentes: el propio SRM, un convertidor de potencia, sensores de posición del rotor y un controlador, como se muestra en la Figura 5.
Figura 5 Diagrama de bloques del sistema de motor de reluctancia conmutada
La estructura principal del SRM incluye el estator, el rotor, los sensores de posición, los cojinetes delantero y trasero, las tapas delantera y trasera y la carcasa del motor, como se muestra en la figura 6. El estator está formado por el núcleo y los bobinados.
Figura 6 Estructura del motor de reluctancia conmutada
1- Tapa frontal 2- Cojinete delantero 3- Rotor 4- Eje motor 5- Estator 6- Carcasa del motor 7- Cojinete trasero 8- Tapa trasera 9- Sensor de posición 10- Tapa de mantenimiento del sensor 11- Ventilador de refrigeración 12- Tapa del ventilador
Tanto el núcleo del estator como el rotor utilizan estructuras de polos salientes y están formados por láminas de acero al silicio laminado. Los polos salientes del estator están equipados con bobinados, mientras que el rotor no tiene bobinados ni imanes permanentes.
La estructura trifásica de 6/4 polos indica que el estator del motor tiene seis polos salientes y el rotor cuatro. Los devanados concentrados en dos polos salientes simétricos del estator están conectados en serie para formar una fase, y el número de fases es igual al número de polos salientes del estator dividido por dos, como se muestra en la Figura 7(a).
Figura 7 Estructura de los polos salientes y devanados del motor de reluctancia conmutada
La estructura trifásica de 12/8 polos indica que el estator del motor tiene doce polos salientes y el rotor ocho polos salientes. Los devanados de cuatro polos salientes simétricos del estator están conectados en serie para formar una fase, y el número de fases es igual al número de polos salientes del estator dividido por cuatro, como se muestra en la Figura 7(b).
Cuantas más fases tenga un motor de reluctancia conmutada, menor será el ángulo de paso, más suave será el funcionamiento y más favorable será la reducción de la ondulación del par. Sin embargo, el control se hace más complejo, lo que conlleva un aumento del número de dispositivos de conmutación principales y de los costes.
El cálculo del ángulo de paso se muestra en la ecuación (2):
α = 360° × (Número de polos del estator - Número de polos del rotor) / (Número de polos del estator)
Por ejemplo, para un motor trifásico de 6/4 polos, el ángulo de paso α = 360° × 2/(6×4) = 30°.
2. Principio de funcionamiento del motor de reluctancia conmutada
(1) Principio de funcionamiento del motor de reluctancia conmutada
Como se muestra en el diagrama del principio de funcionamiento del SRM trifásico de 12/8 polos en la Figura 8, cuando la corriente del devanado de la fase A controla el interruptor principal S1, S2 para que se cierre, la fase A se energiza y magnetiza.
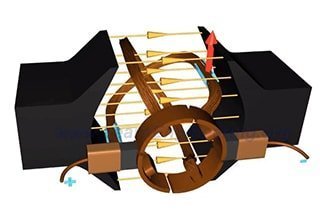
Figura 8 Principio de funcionamiento de un motor de reluctancia conmutada
La fuerza del campo magnético generada dentro del motor forma un campo magnético radial con OA como eje. Las líneas de fuerza magnética de este campo se curvan cuando atraviesan el entrehierro entre los polos salientes del estator y los polos salientes del rotor.
En este momento, la reluctancia magnética del circuito magnético es mayor que cuando coinciden el polo saliente del estator y el polo saliente del rotor. Por lo tanto, el polo saliente del rotor se ve afectado por la atracción magnética, que alinea el eje del polo del rotor Oa con el eje del polo del estator OA.
Esto genera un par electromagnético de propiedad de reluctancia magnética, haciendo que el rotor comience a girar en sentido antihorario. Cuando se desconecta la corriente de fase A y se establece la fuente de alimentación de fase B, el campo magnético dentro del motor gira 30 grados.
A continuación, el rotor gira 15 grados más en el sentido contrario a las agujas del reloj bajo la acción de la tracción electromagnética. Si se suministra alimentación secuencialmente a los devanados de fase A-B-C-A, el rotor girará continuamente en sentido antihorario.
Cuando los devanados del estator de cada fase se energizan a su vez, el campo magnético del estator gira 3×30 grados, y el rotor gira un paso de polos de rotor de 3×15 grados (es decir, 360 grados / número de polos salientes del rotor).
Si se suministra corriente secuencialmente a los devanados de fase A-C-B-A, el rotor girará en el sentido de las agujas del reloj. El sentido de giro del motor de reluctancia conmutada no está relacionado con el sentido de la corriente, sino que viene determinado por la secuencia de alimentación de los devanados de fase del estator.
En el funcionamiento real de los motores multifásicos, también es común que dos o más devanados de fase se energicen simultáneamente.
(2) Principio de funcionamiento de un generador de reluctancia conmutada
El estado de funcionamiento de un generador de reluctancia conmutada implica tres condiciones: el estado de excitación, el estado de continuación y el estado de generación de potencia, como demuestra la forma de onda de la inductancia de fase L de la figura 10.
Figura 9 Esquema del estado de funcionamiento de un motor de reluctancia conmutada
Figura 10 Cambios en la inductancia de fase con la posición del rotor
En la figura 9, el ángulo θ se define como el ángulo entre el eje del polo del diente del rotor y el eje de la ranura del diente del estator. Cuando el eje del polo del diente del rotor se alinea con el correspondiente eje de la ranura del diente del estator, la inductancia de fase se encuentra en su valor mínimo (definido como θ=0°). La inductancia de fase del devanado permanece constante en Lmin hasta que el borde de ataque del polo del rotor se encuentra con el borde de salida del polo del estator (θ=θ1).
A medida que el rotor continúa girando y el polo del rotor comienza a solaparse con el polo del estator, hasta que el borde de salida del polo del rotor y el borde de salida del polo del estator se alinean completamente (en este momento, θ=θ2), la inductancia de fase del devanado aumenta linealmente dentro de esta región, alcanzando un máximo de Lmax.
Cuando el rotor continúa girando de forma que el borde de ataque del polo del rotor se alinea con el borde de ataque del polo del estator (en este momento, θ=θ4), la inductancia de fase permanece en Lmax.
Según la teoría básica del campo electromagnético, la existencia de un campo magnético va acompañada del par electromagnético del rotor del motor, que puede representarse mediante la ecuación (3).
Si los bobinados del motor de reluctancia conmutada se conectan y desconectan entre θ3 y θ4, el motor funciona como un generador. En este momento, se forma una corriente en la región de inductancia decreciente, por lo que dL/dθ<0.
Si en ese momento pasa corriente por los devanados de fase, se genera un par de frenado (T(θ, i)<0). Si una fuerza mecánica externa mantiene la rotación del motor, éste absorbe energía mecánica y la convierte en salida eléctrica, lo que indica que el motor de reluctancia conmutada funciona en modo generador.
3. Ventajas, desventajas y ámbito de aplicación de los motores de reluctancia conmutada
Las ventajas de los motores de reluctancia conmutada son su estructura sencilla y fiable, su buen comportamiento en el arranque, su alto rendimiento y su bajo coste. Ofrecen una amplia gama de capacidades de control de velocidad variando la conducción, los ángulos de desconexión y la tensión. Sin embargo, entre sus desventajas se encuentran una importante ondulación del par y un elevado nivel de ruido.
Actualmente, se utilizan en algunos vehículos pequeños de propulsión eléctrica, como los scooters eléctricos de movilidad a cuatro ruedas y los coches patrulla.
IV. Conclusión
Dadas las distintas características de rendimiento que requieren los motores de propulsión de los vehículos de nueva energía, el tipo de motor de propulsión seleccionado varía según los distintos modelos del mercado.
Este artículo describe la estructura y los principios de funcionamiento de los motores de accionamiento de nueva energía más utilizados, como los motores asíncronos de CA, los motores síncronos de imanes permanentes y los motores de reluctancia conmutada. Esta información ayudará a comprender mejor estos motores de accionamiento.
Además, la estructura y los principios de cada tipo de motor difieren, lo que da lugar a una amplia gama de aplicaciones. De acuerdo con la planificación estratégica industrial nacional, la investigación centrada en los sistemas de propulsión eléctrica de los vehículos de nueva energía respetuosos con el medio ambiente seguirá ampliándose. En consecuencia, la variedad y el nivel tecnológico de los motores también seguirán avanzando.
Como fundador de MachineMFG, he dedicado más de una década de mi carrera a la industria metalúrgica. Mi amplia experiencia me ha permitido convertirme en un experto en los campos de la fabricación de chapa metálica, mecanizado, ingeniería mecánica y máquinas herramienta para metales. Estoy constantemente pensando, leyendo y escribiendo sobre estos temas, esforzándome constantemente por mantenerme a la vanguardia de mi campo. Deje que mis conocimientos y experiencia sean un activo para su empresa.
¿Alguna vez se ha preguntado cómo los trenes pueden flotar sobre las vías o cómo los robots consiguen movimientos precisos? Este artículo desvela el fascinante mundo de los motores lineales, explicando sus principios, tipos y ventajas únicas....
Los servosistemas son parte integrante de los productos electromecánicos y proporcionan el máximo nivel de respuesta dinámica y densidad de par. De ahí que la tendencia en el desarrollo de sistemas de accionamiento sea sustituir los tradicionales...
¿Se ha preguntado alguna vez qué diferencia a los motores de corriente continua de los de corriente alterna? En este artículo, exploramos las diferencias fundamentales entre estos dos tipos de motores, incluidos sus principios de funcionamiento,...
¿Se ha preguntado alguna vez qué es lo que hace que el mundo gire sin problemas? Los héroes anónimos entre bastidores son los rodamientos. Estos pequeños pero poderosos componentes desempeñan un papel crucial en la reducción de la fricción...
¿Alguna vez se ha preguntado qué hace funcionar las máquinas que mueven nuestro mundo? Las cajas de cambios son los héroes anónimos de muchas industrias, desde la automoción hasta la energía eólica. En este artículo explorarás...
Elegir el servomotor adecuado para su proyecto puede ser una tarea desalentadora con tantas opciones disponibles. Este artículo simplifica el proceso desglosando las consideraciones clave: aplicación...
¿Cómo convierten los motores eléctricos la electricidad en movimiento? Imagínese un mundo en el que casi la mitad de nuestra energía se mueve gracias a estos motores. Este artículo se sumerge en la ciencia que hay detrás de los motores eléctricos, explicando...
Imagine el mundo sin el zumbido de los motores: sin coches, sin electrodomésticos, sin máquinas industriales. Los motores transforman la energía eléctrica en mecánica y hacen funcionar desde juguetes hasta gigantes de la industria. En este...