Stampaggio di bracci robotici: la guida definitiva
Come possono le fabbriche tenere il passo con le incessanti richieste della produzione moderna? I bracci robotici di stampaggio offrono una soluzione convincente, trasformando la produzione con efficienza e precisione senza precedenti. Questo articolo approfondisce il loro ruolo nell'automatizzazione delle attività, nel miglioramento della produzione e nella riduzione degli errori. I lettori scopriranno i principali vantaggi dell'integrazione di questi bracci robotici nelle loro attività, dall'efficacia dei costi ai miglioramenti della sicurezza. Immergetevi per capire come queste meraviglie tecnologiche stiano plasmando il futuro dell'automazione industriale.
Il braccio robotico di stampaggio è un componente cruciale della produzione intelligente.
Gli stampi per lo stampaggio automatico svolgono un ruolo fondamentale nel processo di stampaggio. Senza stampi adeguati, è difficile realizzare una produzione di stampaggio di massa e, senza stampi avanzati, non è possibile implementare una tecnologia di stampaggio avanzata.
I tre elementi che compongono la lavorazione di stampaggio sono il processo e lo stampo di stampaggio, le attrezzature di stampaggio e i materiali di stampaggio. Solo la loro combinazione consente di produrre pezzi di stampaggio. Il costo di un robot di stampaggio è relativamente basso e può essere ammortizzato in un anno e mezzo.
Il prezzo di un braccio robotico varia da 60.000 a 100.000 Yuan, a seconda del numero di assi e della marca. Sebbene il costo iniziale possa essere elevato, è equivalente allo stipendio di diversi dipendenti se calcolato in base al tempo e al mese.
Inoltre, l'efficienza operativa di un braccio robotico di tranciatura è significativamente più elevata e il tasso di errore è molto più basso rispetto al funzionamento manuale.
La crescita dell'industria robotica presenta nuove opportunità per il settore manifatturiero intelligente di fascia alta della Cina.
Grazie all'elevata efficienza produttiva, ai bassi costi di lavorazione e alla qualità costante, produzione di stampaggio è fondamentale per l'industria automobilistica, degli elettrodomestici, dell'elettronica e di altri settori.
Il braccio robotico di stampaggio è un oggetto di controllo comunemente utilizzato nel campo dell'automazione industriale.
Le moderne officine di stampaggio impiegano spesso bracci robotici per aumentare l'efficienza della produzione e per eseguire compiti impegnativi o pericolosi che altrimenti verrebbero svolti dagli operai.
Un braccio robotico per lo stampaggio può eseguire una varietà di compiti, come il movimento di oggetti, l'assemblaggio, il taglio, la spruzzatura e altro ancora.
Che cos'è una timbratura braccio robotico?
Il braccio robotico di stampaggio è un tipo di attrezzatura ausiliaria per la produzione di precisione che sostituisce le operazioni manuali con dispositivi intelligenti.
È dotato di un'interfaccia uomo-macchina e di una Controllo PLC Il sistema di timbratura è stato progettato per semplificare l'impostazione della velocità di avanzamento e della distanza tra i passi. Inoltre, consente all'utente di impostare l'uscita target di timbratura e di visualizzare la quantità di timbratura corrente.
Il braccio robotico di stampaggio dispone anche di una funzione di segnalazione di anomalie, che semplifica la manutenzione. Integra un braccio robotico, un meccanismo di alimentazione, un meccanismo di ricezione e un rack di impilamento.
Grazie al dispositivo di alimentazione completamente automatico e al meccanismo di alimentazione ausiliario, il braccio robotico di stampaggio è in grado di eseguire operazioni di stampaggio, presa e alimentazione completamente automatiche, sostituendo efficacemente le operazioni manuali.
Può inoltre adottare una doppia alimentazione servoassistita per una maggiore precisione, efficienza e facilità di regolazione della velocità di avanzamento e della distanza tra i gradini.
Il braccio robotico per lo stampaggio è ampiamente utilizzato per una serie di grandi lamiera stampaggio di pezzi, stiramento di pezzi, operazioni a stazione singola e linee di produzione automatiche.
Caratteristiche della timbratura braccio robotico
L'intero braccio robotico della pressa è stato progettato e realizzato in conformità agli standard CE, garantendo un'elevata efficienza di trasferimento. L'azionamento principale è alimentato da un servomotore importato, controllato da un microcomputer e gestito tramite un'interfaccia uomo-macchina.
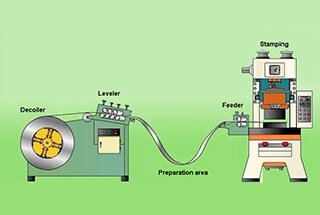
La modalità di alimentazione del braccio robotico di tranciatura consente di utilizzare un alimentatore ad aria o un alimentatore a rulli NC con materiale in bobina e un rack di impilamento a doppia pila con materiale in fogli. È possibile selezionare facilmente il numero di tavoli di punzonatura, tavoli di rotazione e altre apparecchiature che richiedono un'azione continua.
Per adattarsi a pezzi diversi, il braccio robotico di stampaggio è dotato di varie opzioni di presa, tra cui ventose a vuoto, aspirazione elettromagnetica del ferro e dispositivi pneumatici, selezionati in base alle caratteristiche dei pezzi (come il materiale e le caratteristiche strutturali).
Il braccio robotico per lo stampaggio presenta un design modulare funzionale, con moduli funzionali specializzati creati in base ai requisiti unici del processo di stampaggio di diversi settori industriali. Il risultato è un sistema stabile e facilmente combinabile.
Utilizzando una combinazione di tecnologia tedesca ed esperienza locale, il braccio robotico di stampaggio è progettato per soddisfare le esigenze specifiche dei clienti, ottenendo un sistema di stampaggio ottimale.
I componenti chiave del braccio robotico di stampaggio, compreso il computer di controllo, provengono tutti da rinomati marchi europei e godono di una reputazione di qualità stabile e affidabile, contribuendo a ridurre i costi di manutenzione del cliente.
Il braccio robotico della pressa, l'attrezzatura di stampaggio e lo stampo sono tutti integrati in un sistema di stampaggio professionale e automatico, che consente la completa automazione del processo produttivo.
Il braccio robotico di stampaggio riduce i costi di manodopera e di materiale e consente di risparmiare spazio.
Il braccio robotico della pressa è dotato di un sistema di controllo computerizzato che consente di impostare i parametri, la velocità di avanzamento, le impostazioni dei passi, l'uscita del target di timbratura e visualizza la quantità di timbratura corrente. Include inoltre una funzione di segnalazione dei guasti e semplifica la manutenzione.
Tipi di punzone braccio robotico
L'uso di un braccio robotico per la sostituzione degli utensili è il più diffuso grazie alla sua flessibilità nel cambio degli utensili e alla capacità di ridurre i tempi di sostituzione.
Nel cambio automatico degli utensili Macchina CNC strumenti, esistono varie forme e tipi di bracci robotici utilizzati.
Il tempo di cambio utensile si allunga, poiché la pinza di serraggio è responsabile sia del caricamento che dello scaricamento dell'utensile, sia che si trovi sul magazzino utensili che sul mandrino.
2. Braccio singolo a doppio artiglio braccio robotico
Il braccio di questo tipo di braccio robotico è dotato di due artigli di serraggio, ciascuno con un ruolo specifico.
Uno degli artigli è l'unico responsabile della rimozione dell'utensile usato dal mandrino e del suo ritorno nel magazzino utensili, mentre l'altro è dedicato al recupero del nuovo utensile dal magazzino e al suo posizionamento sul mandrino.
Di conseguenza, il tempo di cambio utensile è ridotto rispetto al braccio robotico rotante a un solo artiglio menzionato in precedenza.
3. Braccio singolo a doppio artiglio rotante braccio robotico
Questo tipo di braccio robotico è dotato di una pinza di bloccaggio su entrambe le estremità del braccio.
Questi due artigli sono in grado di trattenere gli utensili contemporaneamente, sia sul magazzino utensili che sul mandrino.
Con una rotazione di 180 gradi, l'unità NC strumenti di punzonatura sono entrambi restituiti al magazzino utensili e installati sul mandrino allo stesso tempo, con conseguente riduzione dei tempi di cambio utensile rispetto ai bracci robotici a braccio singolo di cui sopra. Questa è la forma più utilizzata.
4. Doppio braccio robotico
Questo Torretta CNC Il braccio robotico del punzone è equivalente a due bracci robotici a un solo braccio e a un solo artiglio che lavorano insieme per il cambio automatico degli utensili. Il primo braccio robotico rimuove il "vecchio coltello" dal mandrino e lo riporta nel magazzino utensili. Il secondo braccio recupera un "nuovo utensile" dal magazzino e lo installa nel mandrino della macchina.
5. I due bracci di questa macchina cardatrice possono muoversi avanti e indietro e incrociarsi in un certo angolo.
Un braccio recupera il "vecchio coltello" dal mandrino e lo riporta nel magazzino utensili, mentre l'altro braccio recupera il "nuovo coltello" dal magazzino utensili e lo installa sul mandrino. L'intero braccio robotico può muoversi in linea retta lungo una guida o ruotare attorno a un albero rotante per facilitare il trasferimento degli utensili tra il magazzino utensili e il mandrino.
6. Bloccaggio della faccia terminale a doppio braccio braccio robotico
Questo tipo di braccio robotico si differenzia dai precedenti per il meccanismo di bloccaggio dell'utensile. Mentre i modelli precedenti di bracci robotici afferravano l'utensile bloccandolo sulla circonferenza esterna dell'impugnatura, questo tipo di braccio blocca invece le due facce finali dell'impugnatura.
Tre componenti chiave del braccio robotico del punzone
I componenti fondamentali del braccio robotico di punzonatura si riferiscono alle unità essenziali che compongono il braccio. sistema di trasmissionesistema di controllo e di interazione uomo-macchina del braccio robotico. Questi componenti svolgono un ruolo cruciale nel funzionamento delle macchine punzonatrici e sono caratterizzati da universalità e modularità.
I componenti sono principalmente suddivisi in tre parti: un riduttore ad alta precisione, un servomotore AC/DC e un driver ad alte prestazioni e un controllore del robot ad alte prestazioni.
1. Riduttore
I riduttori sono i componenti chiave dei bracci robotici a punzone. Oggi ne esistono principalmente due tipi: il riduttore a ingranaggi armonici e il riduttore RV. Questi riduttori sono applicati sia alla base che alle articolazioni del braccio robotico di punzonatura.
Il metodo del riduttore armonico è stato inventato dall'inventore americano C. Walt Musser a metà degli anni Cinquanta. Un riduttore armonico è composto da tre parti principali: un generatore di onde, un ingranaggio flessibile e un ingranaggio rigido. Il generatore di onde controlla la deformazione elastica dell'ingranaggio flessibile, che a sua volta si ingrana con l'ingranaggio rigido per trasmettere movimento e potenza. Il rapporto di velocità della trasmissione a singolo stadio può raggiungere 70-1000. La deformazione dell'ingranaggio flessibile consente l'ingranamento inverso senza gioco.
Rispetto ad altri riduttori, il riduttore armonico è più leggero e compatto, con una riduzione di volume e di peso rispettivamente di 2/3 e 1/2 a parità di coppia in uscita. L'ingranaggio flessibile deve essere realizzato con un materiale ad alta resistenza. resistenza alla fatica e deve essere sottoposto a complesse lavorazioni e trattamenti termici, poiché sopporta grandi carichi alternati. Le prestazioni dell'ingranaggio flessibile sono fondamentali per un riduttore armonico di alta qualità.
2. Servomotore e driver
Per quanto riguarda i servomotori e gli azionamenti, i principali marchi europei sono Lenz, Lust e Bosch Rexroth. Questi motori e azionamenti europei vantano un'impressionante capacità di sovraccarico, una risposta dinamica e una forte apertura del driver e dell'interfaccia bus, ma hanno un prezzo elevato.
I marchi giapponesi, come Yaskawa, Panasonic e Mitsubishi, offrono prezzi relativamente bassi, ma la loro risposta dinamica e le capacità di apertura sono carenti e la maggior parte di essi dispone solo di modalità di controllo analogico della quantità e degli impulsi.
3. Controllore
Per quanto riguarda i controller per bracci robotici, l'attuale piattaforma di controller multiasse si divide principalmente in due categorie: schede di controllo del movimento con processori integrati (come DSP e PowerPC) come nucleo, e sistemi PLC con computer industriali e sistemi in tempo reale come nucleo.
I rappresentanti di queste categorie sono rispettivamente la scheda PMAC di DeltaTau e il sistema TwinCAT di Beckhoff.
Principali forme di lavoro del braccio robotico a punzone
La formatura dei pezzi è composta da un meccanismo di materiale superiore e inferiore e da un punzone. I processi superiore e inferiore del punzone sono progettati per soddisfare i requisiti di funzionamento automatico e le condizioni di produzione in base alle esigenze del processo produttivo.
Il braccio robotico di punzonatura svolge un ruolo cruciale nella linea di produzione di stampaggio. Controlla il coordinamento dei movimenti tra il braccio robotico e la piattaforma girevole di alimentazione, assicurando il carico e lo scarico efficiente dei materiali. Il braccio ha una manutenzione stabile, un basso tempo di risposta, un'elevata affidabilità e un controllo economico.
Nel processo di stampaggio, il braccio robotico di punzonatura esegue automaticamente una serie di azioni specifiche basate su un programma preselezionato, consentendo il bloccaggio e il trasporto automatico degli oggetti. La distanza del materiale alimentato dal robot di alimentazione automatica per ogni stampaggio viene definita "passo di alimentazione", che può essere determinato in base alla forma e alle dimensioni del pezzo da stampare e alle esigenze del processo di stampaggio.
Il ciclo è sincronizzato con il punzone, consentendo una produzione continua. La struttura complessiva è semplice e compatta, con trasmissione stabile, prestazioni affidabili, uso sicuro e funzionamento comodo. Il braccio è anche facile da lavorare, smontare, regolare, mantenere e ha una produzione economica.
Ha un vasto potenziale di applicazione nell'industria dell'estrusione a freddo, in particolare nel processo di stampaggio dei cuscinetti.
Forme di guida del braccio robotico del pugno
1. Azionamento idraulico
Il braccio robotico ad azionamento idraulico di Punch Robotics è tipicamente composto da componenti idraulici come vari cilindri dell'olio, motori dell'olio, una servovalvola, una pompa dell'olio e un serbatoio dell'olio. Il sistema viene azionato dall'attuatore del braccio robotico trainante.
Vanta una notevole capacità di sollevamento, con la possibilità di sollevare fino a centinaia di chilogrammi.
Il braccio robotico ad azionamento idraulico è noto per la sua struttura compatta, la stabilità durante il funzionamento, la resistenza agli urti e alle vibrazioni e le buone prestazioni antideflagranti. Tuttavia, per garantirne il corretto funzionamento, i componenti idraulici devono essere realizzati con un'elevata precisione e avere una forte capacità di tenuta per evitare perdite di olio e inquinamento ambientale.
2. Azionamento pneumatico
Il sistema di azionamento del braccio robotico è tipicamente composto da cilindri, valvole d'aria, serbatoi d'aria e compressori d'aria.
Questo sistema è caratterizzato da una comoda fonte d'aria, da un'azione rapida, da un design semplice, da un costo contenuto e dalla facilità di manutenzione.
Tuttavia, il controllo della velocità può essere impegnativo e la pressione dell'aria non deve essere troppo elevata, con conseguente capacità di strappo limitata.
3. Azionamento elettrico
L'azionamento elettrico del braccio Punch Robotics è il metodo di alimentazione più comunemente utilizzato.
È noto per la sua comoda fonte di alimentazione, il rapido tempo di risposta, la forte forza di azionamento (con un peso di tenuta del giunto che raggiunge i 400 kg), la facilità di rilevamento ed elaborazione del segnale e la possibilità di utilizzare una serie di metodi di controllo flessibili.
Il motore di azionamento utilizza in genere un motore passo-passo, mentre i servomotori a corrente continua (CA) sono la modalità di funzionamento principale.
Per gestire l'alta velocità del motore, è necessario impiegare un meccanismo di riduzione come un azionamento armonico, un azionamento a girandola ciclica RV, un azionamento a ingranaggi, un azionamento a vite o un meccanismo a più aste.
Tuttavia, si sta diffondendo la tendenza a utilizzare motori a coppia elevata e bassa velocità per l'azionamento diretto (DD) senza la necessità di un meccanismo di riduzione, che semplifica il sistema e migliora la precisione del controllo.
4. Azionamento meccanico
L'azionamento meccanico del braccio Punch Robotics viene utilizzato solo in situazioni in cui è richiesta un'azione fissa.
In genere, per ottenere l'azione specificata si utilizza un meccanismo di collegamento a camme.
Questo metodo di azionamento è noto per il suo funzionamento affidabile, l'elevata velocità di lavoro e il basso costo. Tuttavia, può essere difficile da regolare.
Come gestire il guasto del braccio robotico del pugno?
Sebbene il braccio Punch Robotics sia un prodotto altamente tecnologico, può comunque presentare dei problemi. In caso di problemi, è possibile adottare diverse misure per risolverli.
In genere, il braccio Punch Robotics presenta pochi problemi. Tuttavia, se si riscontra un problema, non bisogna farsi prendere dal panico. Innanzitutto, cercate di risolvere il problema utilizzando i metodi raccomandati dal produttore.
Se non si riesce a risolvere il problema da soli, è possibile rivolgersi direttamente al produttore per ottenere assistenza. Tutti i bracci Punch Robotics sono coperti da una garanzia di un anno e offrono un'assistenza post-vendita continua.
In caso di problemi, è meglio contattare direttamente il produttore per trovare una soluzione.
1. Verificare la presenza di fonti di disturbo in prossimità degli elementi di controllo del braccio robotico di tranciatura.
Se il segnale analogico di un braccio robotico di stampaggio è instabile, dopo aver eliminato il problema della sorgente del segnale, è opportuno considerare la possibilità di un disturbo del segnale. Per risolvere il problema, è necessario identificare il tipo e l'intensità della fonte di disturbo. A tal fine è possibile installare un isolatore, utilizzare fili di colla a doppia schermatura o aggiungere un punto di messa a terra dell'apparecchiatura.
2. Controllare tutte le fonti di alimentazione, aria e idraulica del braccio robotico di stampaggio.
Il braccio robotico di stampaggio può avere problemi dovuti all'alimentazione, alla fonte d'aria e alla fonte idraulica. Per risolvere questi problemi, è importante verificare quanto segue:
Alimentazione: Verificare che la tensione del circuito principale e del circuito di controllo sia normale e che non vi siano perdite di fase.
Fonte d'aria: In base ai requisiti della fonte d'aria, assicurarsi che la pressione del sistema sia normale, che la qualità dell'aria compressa sia conforme agli standard e che non vi siano perdite o blocchi nella tubazione.
Impianto idraulico: Verificare che la pressione e la temperatura dell'impianto rientrino nei valori normali, che non vi siano perdite o blocchi nelle tubazioni e che l'impianto non sia contaminato da impurità.
3. Controllare i componenti di controllo del braccio robotico di stampaggio.
In caso di problemi con il braccio robotico di stampaggio, è importante controllare il motore e la valvola per individuare eventuali problemi che potrebbero essere la causa del problema. In genere, questi problemi sono relativamente semplici da identificare e risolvere.
Successivamente, è necessario ispezionare i componenti di controllo, poiché questi difetti possono essere più difficili da individuare. Per determinare se le condizioni di funzionamento dei componenti sono normali, è necessario eseguire misurazioni e test accurati secondo lo schema.
Se alcuni componenti del controllore non possono essere misurati o giudicati, come ad esempio una convertitore di frequenza, possono essere testati scambiando i componenti o sostituendoli con altri nuovi.
4. Controllare se l'orientamento del sensore o del componente testato del braccio robotico di tranciatura è sfalsato.
L'incuria del personale addetto alla protezione dell'apparecchiatura può provocare un orientamento errato di alcuni sensori, con conseguente disallineamento, malfunzionamento dei sensori o problemi di sensibilità. Per evitare che ciò accada, è importante controllare regolarmente l'orientamento e la sensibilità dei sensori sul braccio robotico di stampaggio ed effettuare le regolazioni necessarie. Se un sensore è rotto, deve essere sostituito immediatamente.
Inoltre, a causa dell'uso continuo delle apparecchiature di automazione, la maggior parte dei sensori e dei blocchi di rilevamento può allentarsi nel tempo. Pertanto, durante la manutenzione quotidiana, è importante verificare che l'orientamento dei sensori sul braccio robotico di stampaggio sia corretto e fissato in modo sicuro.
Manutenzione del braccio robotico di stampaggio
È necessario eseguire ispezioni e manutenzioni regolari di ogni serie di bracci robotici di punzonatura e una persona designata deve essere responsabile di questo compito.
Prima di iniziare il lavoro ogni giorno, accertarsi che il braccio robotico di punzonatura sia acceso. La macchina utensile può essere utilizzata solo dopo averne verificato le normali condizioni di funzionamento.
Stabilire una routine di pulizia regolare del braccio robotico di punzonatura, prestando particolare attenzione alla pulizia della piastra del filtro per evitare l'accumulo di olio e polvere. Se possibile, si consiglia di costruire una copertura protettiva per il braccio robotico di punzonatura.
Se la macchina utensile richiede la sostituzione o il debug dello stampo, regolare l'altezza e la distanza di sicurezza del braccio robotico del punzone in una posizione adeguata dopo aver completato queste operazioni.
Evitare di impilare oggetti vicino all'installazione del braccio robotico di punzonatura per evitare potenziali danni al braccio.
Le ispezioni e la manutenzione professionale del braccio robotico di stampaggio devono essere eseguite almeno una volta all'anno, se possibile. In caso di malfunzionamento del braccio robotico, non tentare di ripararlo senza l'autorizzazione necessaria e rivolgersi a un tecnico professionista.
Recensione del braccio robotico Press
La prima modalità di simulazione dell'esame (modalità 1 e modalità continua) sottolinea l'importanza della sicurezza quando si viaggia.
Per quanto riguarda il numero di punzoni slave, esistono due opzioni: multistazione singola e multiconnessione.
Nota: Il termine "qui" si riferisce sia a una singola unità che a più unità. Tuttavia, una linea di produzione formata da più unità singole non rientra nell'ambito della presente descrizione.
Si possono ottenere i seguenti quattro quadranti:
Installazione singola
Installazioni multiple
Singolo Continuo
Multiplo Continuo
Il livello di difficoltà aumenta gradualmente, partendo dal più facile al più difficile.
1. Installazione singola
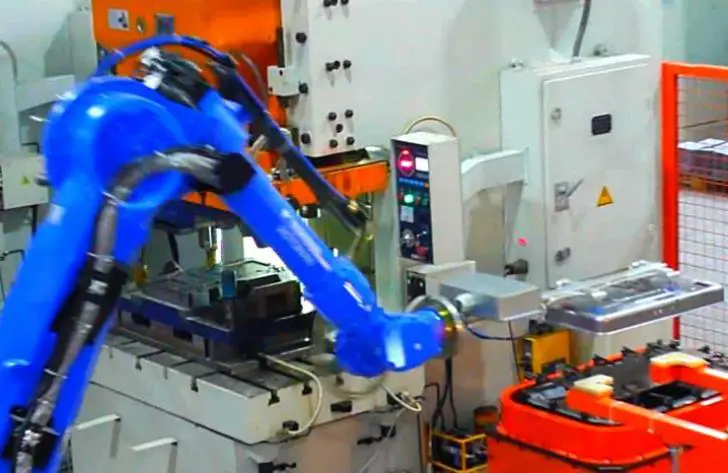
1) Molte persone dovrebbero pensare subito a un robot a sei articolazioni
Le quattro principali famiglie di robot del settore, KUKA, YASKAWA, ABB e FANUC, sono note per la loro affidabilità.
Vale la pena di ricordare che i robot a sei giunti sono ben consolidati nel campo della saldatura, ma sono più adatti per le applicazioni di stampaggio.
Ad esempio, YASKAWA offre robot generici e specializzati per lo stampaggio. È fondamentale scegliere il tipo specializzato per le attività di stampaggio.
Tuttavia, questi robot specializzati hanno un costo molto più elevato a causa delle varie configurazioni di riduttori e motori.
Campo di applicazione: Il campo più versatile, con opzioni di progettazione flessibili.
Efficienza: In media, questi robot possono completare 6-8 cicli al minuto.
Alcuni modelli ad alte prestazioni possono raggiungere anche i 10 cicli al minuto.
Prezzo: Nonostante l'elevata efficienza, questi robot hanno un costo molto elevato.
2) Semplice braccio robotico
Recentemente, questo tipo di robot è diventato molto popolare, con centinaia di produttori nel Guangdong, in Cina.
Ha una struttura semplice e un costo contenuto e può essere azionato da due persone.
Tuttavia, va notato che questo tipo di robot non è disponibile in Europa, America, Giappone e Corea del Sud, il che evidenzia il successo della Cina nel fornire il sostituto più economico e conveniente per i robot a sei giunti nel settore dello stampaggio.
Questo tipo di robot mi ricorda l'evento delle onde gravitazionali.
Per arrivare al punto, questo robot è adatto solo a situazioni in cui il prodotto è singolo e prodotto in grandi lotti.
Non è necessario cambiare frequentemente lo stampo o eseguire il debug del braccio robotico.
In caso contrario, non dovreste scegliere questo robot solo per il suo basso costo.
Campo di applicazione: Conosciuto per il suo design flessibile, sostituisce tutti i bracci robotici classici e domina il mercato.
Efficienza: Difficile da determinare.
Prezzo: Quanto si vuole (alcuni hanno segnato il prezzo al pubblico a 30.000).
3) In stampo braccio robotico (eredità classica)
Dopo aver parlato della "nuova stella", passiamo alla discussione del design maturo.
In generale, questo tipo di apparecchiature viene utilizzato per gestire le attività tra più processi di una stessa macchina.
È importante notare che l'artiglio meccanico si posiziona nello spazio tra le stazioni dello stampo quando la pressa viene premuta. Pertanto, è necessario riservare uno spazio sufficiente nella progettazione.
Applicazione: Utilizzato nella manipolazione degli stampi.
Efficienza: 8-10 cicli al minuto.
Prezzo: Economico.
2. Installazione multipla
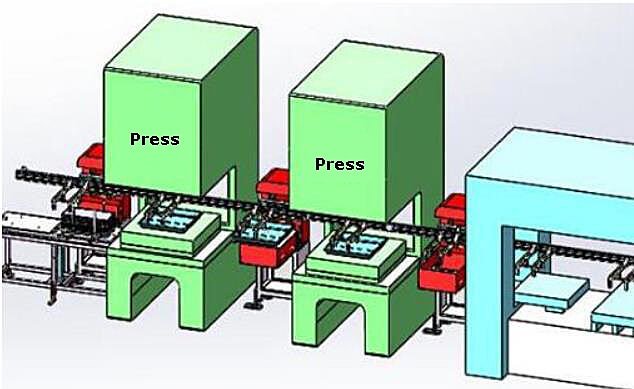
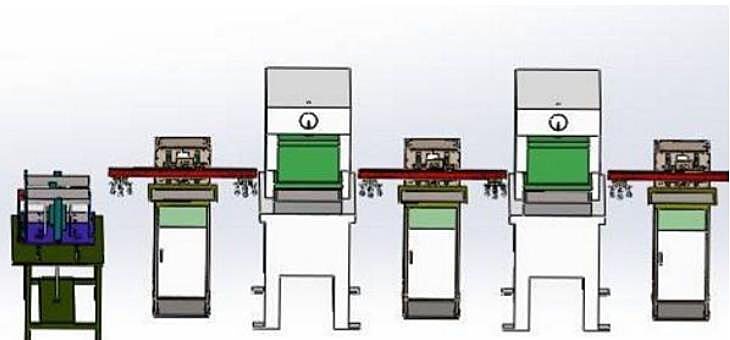
1) Collegamento braccio robotico
Questo tipo di apparecchiatura è caratterizzato da una barra di collegamento che attraversa una fila di punzoni e che è ideale per collegare più serie di punzoni di piccolo tonnellaggio.
Al centro della pressa si trova una stazione intermedia che può aiutare nel processo di rotazione.
Applicazione: Utilizzato nella manipolazione degli stampi.
Efficienza: 8-10 cicli al minuto.
Prezzo: Economico.
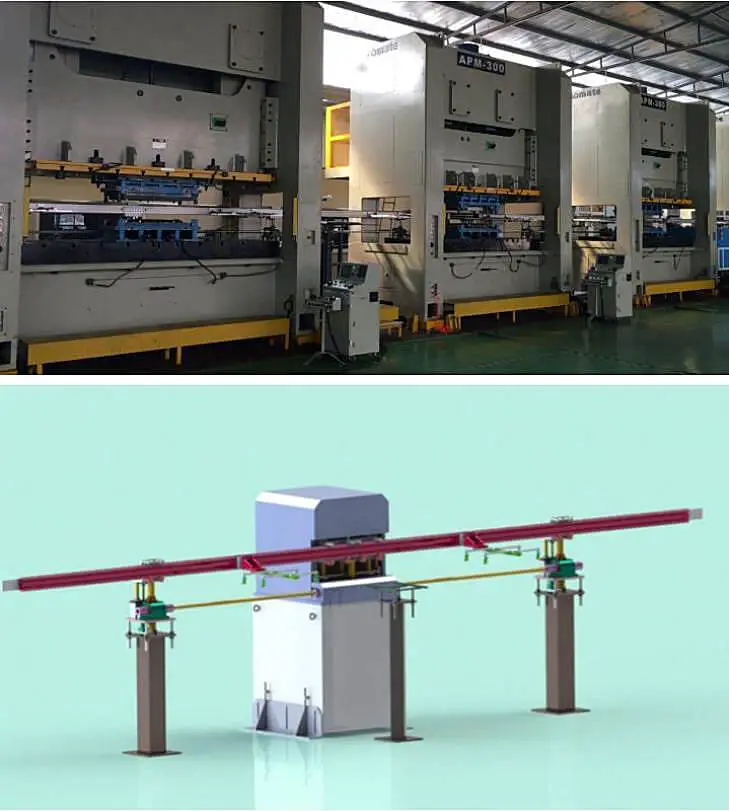
2) Indipendente braccio robotico
Questo tipo di apparecchiatura è adatto alla manipolazione di lamiere di piccole dimensioni con una distanza tra i punzoni non superiore a 1500.
Campi di applicazione: Movimentazione di piccole lamiere e collegamento di più presse.
Efficienza: 8-12 cicli al minuto.
Prezzo: Economico.
3. Singolo continuo
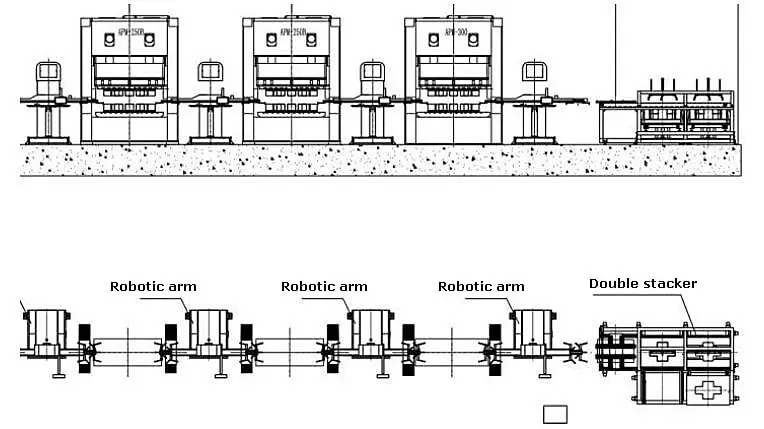
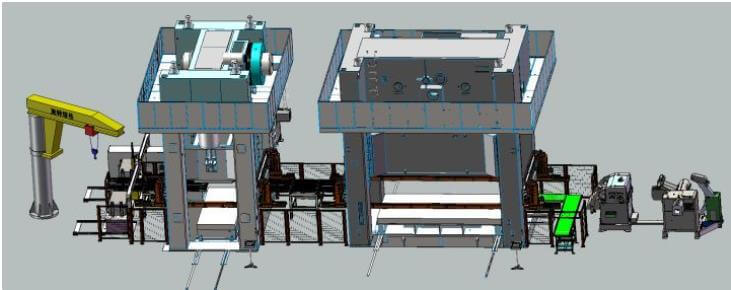
1) NC 3D a due barre braccio robotico
Circa 70% di pezzi stampati nei paesi sviluppati vengono lavorati con questo metodo, che è semplice ed efficiente.
Attualmente, solo pochi produttori nazionali di bracci robotici eccellono in quest'area, in particolare nel settore di fascia alta dei bracci robotici domestici per lo stampaggio.
È importante considerare la progettazione della curva di interferenza delle apparecchiature all'inizio del processo di pianificazione.
Applicazioni: Questo tipo di apparecchiatura ha un'ampia gamma di applicazioni, tra cui i punzoni di grande tonnellaggio e la tranciatura a più stazioni.
Efficienza: L'efficienza è fortemente influenzata dalla corsa e in genere varia da 15 a 40 cicli al minuto.
Prezzo: È l'opzione più conveniente.
2) NC 2D a due barre braccio robotico
Questo tipo di apparecchiatura ha un albero di sollevamento in meno rispetto a un braccio robotico tridimensionale.
Durante il processo di progettazione dello stampo è importante mantenere la stessa altezza orizzontale dei pezzi lavorati dopo lo stampaggio.
Applicazione: Adatto per piccole parti, come le custodie delle batterie e dei motori.
Efficienza: L'efficienza è fortemente influenzata dal processo e può raggiungere i 150 cicli al minuto per le custodie delle batterie 18650. È normale che i pezzi di punzonatura completino 20-40 cicli al minuto.
Prezzo: Economico.
4. Multipli continui
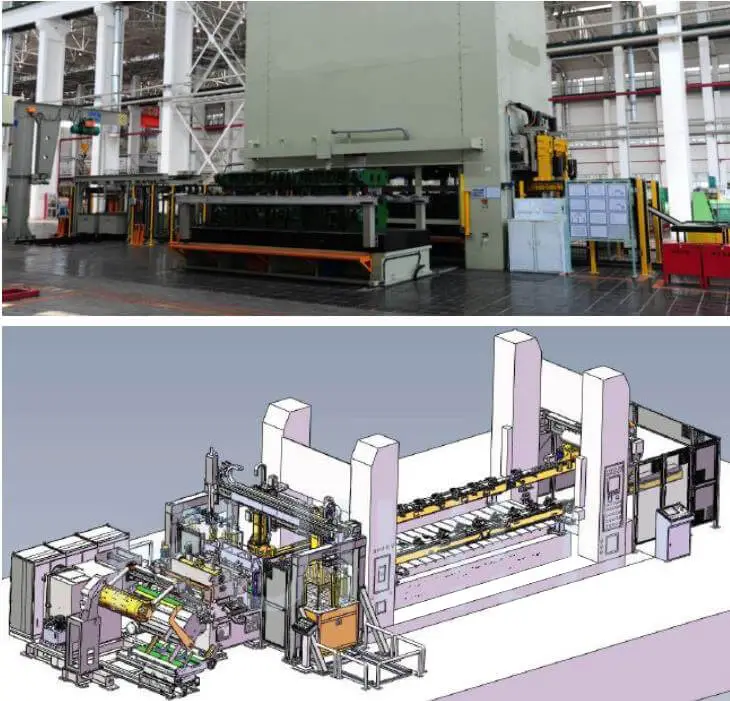
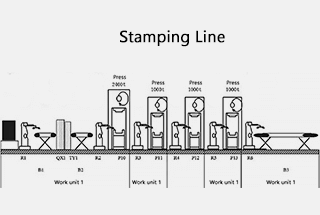
1) Linea di produzione personalizzata OEM
Centinaia di miliardi di linee di produzione guardano verso l'alto con stupore, tutto appare pallido.
Non dimenticatevi che condividere è un'opera di carità! : )
Condividi
Facebook
Twitter
LinkedIn
Reddit
VK
Email
Stampa
Autore
Shane
Fondatore di MachineMFG
In qualità di fondatore di MachineMFG, ho dedicato oltre un decennio della mia carriera al settore della lavorazione dei metalli. La mia vasta esperienza mi ha permesso di diventare un esperto nei campi della fabbricazione di lamiere, della lavorazione, dell'ingegneria meccanica e delle macchine utensili per metalli. Penso, leggo e scrivo costantemente su questi argomenti, cercando di essere sempre all'avanguardia nel mio campo. Lasciate che le mie conoscenze e la mia esperienza siano una risorsa per la vostra azienda.
Vi siete mai chiesti come vengono realizzate le parti metalliche della vostra auto o dei vostri elettrodomestici? La chiave è lo stampaggio dei metalli, un processo che prevede la sagomatura di lamiere con stampi. Questo metodo offre un'elevata...
Vi siete mai chiesti come si producono le automobili in modo così rapido e sicuro? Questo articolo svela la magia delle linee di produzione automatizzate per lo stampaggio, dove i robot sostituiscono il lavoro manuale, aumentando l'efficienza...
Vi siete mai chiesti quale sia l'affascinante mondo dello stampaggio dei metalli? In questo blog post, intraprenderemo un viaggio emozionante per esplorare le complessità di questo processo produttivo essenziale....
Immaginate di aumentare l'efficienza della vostra fabbrica con un'officina di stampaggio perfettamente progettata. Questo articolo approfondisce gli aspetti essenziali della progettazione di un'officina per componenti automobilistici, dalla scelta delle attrezzature al layout...
Avete mai pensato al potenziale rivoluzionario della tecnologia delle servo-presse nella produzione? In questo articolo esploreremo come queste macchine avanzate stiano rivoluzionando il settore, offrendo una precisione, un'efficienza e una...
Vi siete mai chiesti quali produttori dominano il settore delle punzonatrici a torretta? Questo articolo presenta i cinque principali produttori mondiali di punzonatrici a torretta, illustrandone la storia, le innovazioni e le...