Der Stanzroboterarm ist eine entscheidende Komponente der intelligenten Fertigung.
Automatische Stanzwerkzeuge spielen eine entscheidende Rolle im Stanzprozess. Ohne geeignete Werkzeuge ist es schwierig, eine Massenproduktion von Stanzteilen durchzuführen, und ohne fortschrittliche Werkzeuge kann keine fortschrittliche Stanztechnologie eingesetzt werden.
Die drei Elemente, aus denen die Stanzverarbeitung besteht, sind die Prägeverfahren und Matrize, Stanzgerät und Stanzmaterial. Nur wenn diese kombiniert werden, können Stanzteile hergestellt werden. Die Kosten für einen Stanzroboter sind relativ gering, und er kann sich innerhalb eines halben Jahres amortisieren.
Der Preis für einen Roboterarm liegt zwischen 60.000 und 100.000 Yuan, je nach Anzahl der Achsen und Marke. Auch wenn die Anschaffungskosten hoch sind, entsprechen sie dem Gehalt mehrerer Mitarbeiter, wenn man sie nach Zeit und Monat berechnet.
Darüber hinaus ist die Betriebseffizienz eines Stanzroboterarms deutlich höher und die Fehlerquote im Vergleich zum manuellen Betrieb viel geringer.
Das Wachstum der Robotikindustrie eröffnet neue Möglichkeiten für Chinas intelligenten High-End-Fertigungssektor.
Aufgrund seiner hohen Produktionseffizienz, der niedrigen Verarbeitungskosten und der gleichbleibenden Qualität, Stanzproduktion ist von entscheidender Bedeutung für die Automobil-, Haushaltsgeräte-, Elektronik- und andere Industrien.
Der Stanzroboterarm ist ein häufig anzutreffendes Steuerungsobjekt im Bereich der industriellen Automatisierung.
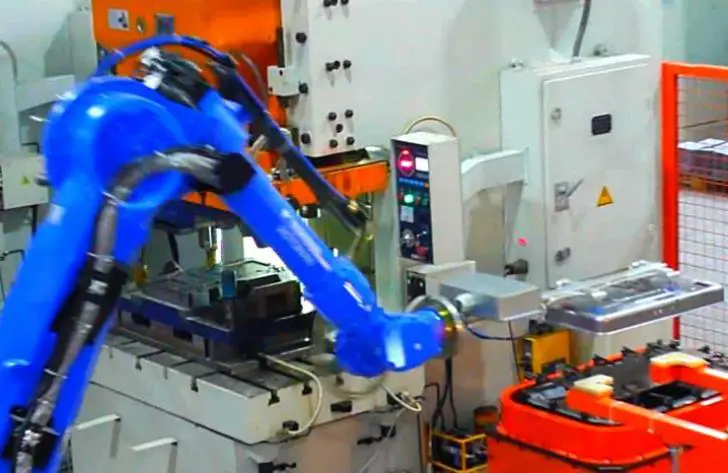
In modernen Stanzwerkstätten werden häufig Stanzroboterarme eingesetzt, um die Produktionseffizienz zu steigern und schwierige oder gefährliche Aufgaben zu übernehmen, die sonst von Arbeitern ausgeführt werden müssten.
Ein Stanzroboterarm kann eine Vielzahl von Aufgaben ausführen, z. B. die Bewegung von Objekten, die Montage, das Schneiden, das Sprühen und vieles mehr.
Was ist eine Prägung? Roboterarm?
Der Stanzroboterarm ist eine Art Präzisionsproduktionshilfsmittel, das manuelle Tätigkeiten durch intelligente Geräte ersetzt.
Es verfügt über eine Mensch-Maschine-Schnittstelle und eine SPS-Steuerung System, mit dem sich die Vorschubgeschwindigkeit und der Schrittabstand leicht einstellen lassen. Außerdem kann der Benutzer den Zielausstoß für die Prägung einstellen und die aktuelle Prägemenge anzeigen.
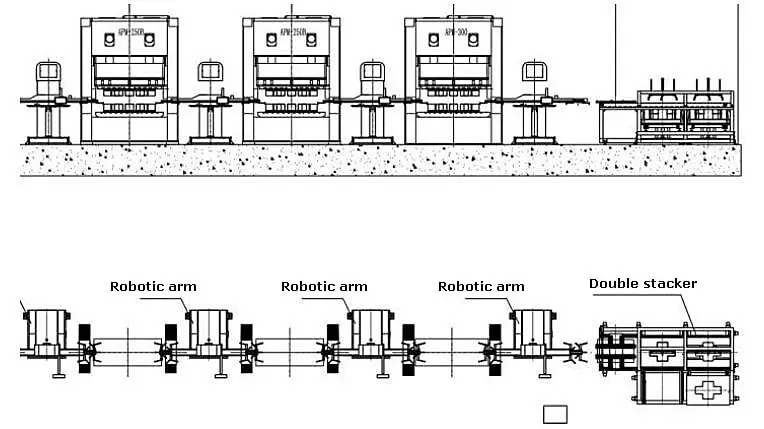
Der Stanzroboterarm verfügt auch über eine Funktion zur Meldung von Störungen, was die Wartung vereinfacht. Er besteht aus einem Roboterarm, einem Zuführungsmechanismus, einem Aufnahmemechanismus und einem Stapelgestell.
Mit der vollautomatischen Zuführungsvorrichtung und dem Hilfszuführungsmechanismus kann der Stanzroboterarm vollautomatisch stempeln, entnehmen und zuführen und so manuelle Arbeitsgänge effektiv ersetzen.
Er kann auch mit einem doppelten Servovorschub ausgestattet werden, um die Präzision und Effizienz zu erhöhen und die Vorschubgeschwindigkeit und den Schrittabstand einfach einzustellen.
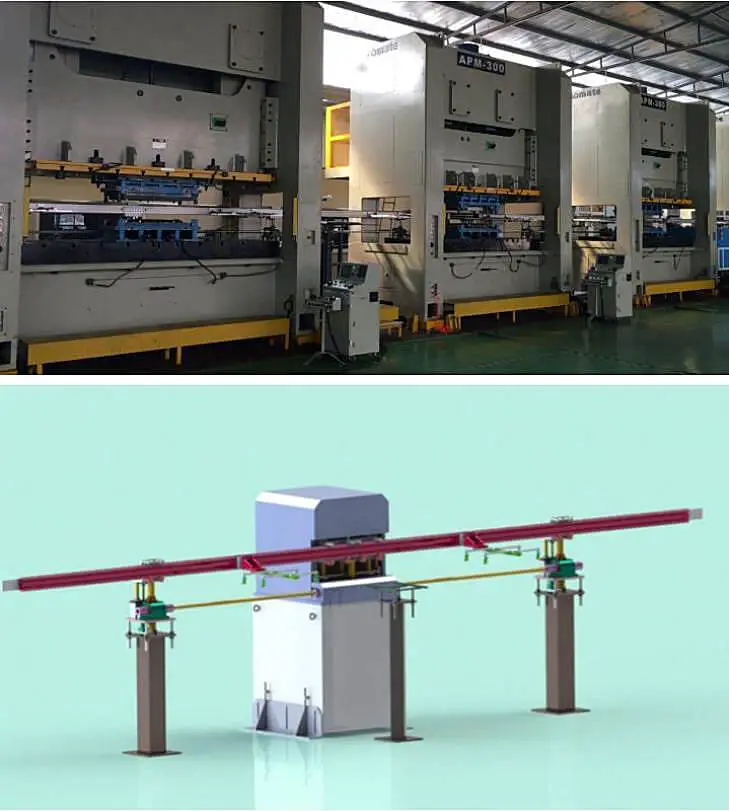
Der Stanzroboterarm wird häufig für eine Vielzahl von großen Feinblech Stanzteile, Streckteile, Einzelstationen und automatische Fertigungsstraßen.
Merkmale des Stanzens Roboterarm
Der gesamte Pressenroboterarm wurde gemäß den CE-Normen entwickelt und hergestellt und gewährleistet eine hohe Transfereffizienz. Der Hauptantrieb wird von einem importierten Servomotor angetrieben, der von einem Mikrocomputer gesteuert und über eine Mensch-Maschine-Schnittstelle bedient wird.
Der Zuführungsmodus des Stanzroboterarms ermöglicht die Verwendung eines Luft- oder NC-Rollenanlegers für Spulenmaterial und eines Doppelstapelregals für Bogenmaterial. Die Anzahl der Stanztische, Wendetische und anderer Geräte, die einen kontinuierlichen Betrieb erfordern, kann einfach ausgewählt werden.
Zur Aufnahme unterschiedlicher Werkstücke ist der Stanzroboterarm mit verschiedenen Greifoptionen ausgestattet, darunter Vakuumsauger, elektromagnetische Eisensauger und pneumatische Spannvorrichtungen, die je nach den Eigenschaften der Teile (z. B. Material und strukturelle Merkmale) ausgewählt werden.
Der Stanzroboterarm zeichnet sich durch ein funktionales, modulares Design aus, bei dem spezielle Funktionsmodule auf der Grundlage der einzigartigen Prägeverfahren Anforderungen der verschiedenen Branchen. Das Ergebnis ist ein stabiles und leicht kombinierbares System.
Durch die Kombination von deutscher Technologie und lokalem Fachwissen wird der Stanzroboterarm auf die spezifischen Bedürfnisse der Kunden abgestimmt, was zu einem optimalen Stanzsystem führt.
Die Schlüsselkomponenten des Stanzroboterarms, einschließlich des Steuercomputers, stammen alle von renommierten europäischen Marken und sind für ihre stabile und zuverlässige Qualität bekannt, was zur Senkung der Wartungskosten beim Kunden beiträgt.
Der Pressroboterarm, die Stanzausrüstung und das Werkzeug sind in ein professionelles und automatisches Stanzsystem integriert, das eine vollständige Automatisierung des Produktionsprozesses ermöglicht.
Der Stanzroboterarm reduziert sowohl Personal- als auch Materialkosten und spart Platz.
Der Pressenroboterarm ist mit einem Computersteuerungssystem ausgestattet, das die Einstellung von Parametern, Vorschubgeschwindigkeit, Schritteinstellungen, Stempelzielausgabe und die Anzeige der aktuellen Stempelmenge ermöglicht. Er verfügt außerdem über eine Fehlermeldefunktion und vereinfacht die Wartung.
Arten von Stanzen Roboterarm
Der Einsatz eines Roboterarms für den Werkzeugwechsel ist aufgrund seiner Flexibilität beim Werkzeugwechsel und seiner Fähigkeit, die Werkzeugwechselzeit zu reduzieren, am beliebtesten.
Beim automatischen Werkzeugwechsel CNC-Maschine Werkzeuge gibt es verschiedene Formen und Typen von Roboterarmen.
Die Werkzeugwechselzeit verlängert sich, da die Spannpratze sowohl für das Be- als auch für das Entladen des Werkzeugs zuständig ist, unabhängig davon, ob es sich auf dem Werkzeugmagazin oder auf der Spindel befindet.
2. Einarmige Doppelklauenschaukel Roboterarm
Der Arm dieses Roboterarms ist mit zwei Klemmklauen ausgestattet, die jeweils eine bestimmte Aufgabe haben.
Eine der Klauen ist ausschließlich für die Entnahme des gebrauchten Werkzeugs aus der Spindel und dessen Rückführung in das Werkzeugmagazin zuständig, während die andere das neue Werkzeug aus dem Magazin entnimmt und auf die Spindel setzt.
Dadurch verkürzt sich die Werkzeugwechselzeit im Vergleich zu dem bereits erwähnten einklauigen Rotationsroboterarm.
3. Einarmige Doppelklaue drehbar Roboterarm
Diese Art von Roboterarm verfügt über eine Klemmklaue an beiden Enden des Arms.
Diese beiden Pratzen können gleichzeitig Werkzeuge am Werkzeugmagazin und an der Spindel halten.
Mit einer 180-Grad-Drehung kann die NC Stanzwerkzeuge werden gleichzeitig in das Werkzeugmagazin zurückgeführt und an der Spindel installiert, was zu einer kürzeren Werkzeugwechselzeit im Vergleich zu den oben erwähnten einarmigen Roboterarmen führt. Dies ist die am häufigsten eingesetzte Form.
4. Doppelter Roboterarm
Diese CNC-Revolver Punch-Roboterarm entspricht zwei einarmigen Roboterarmen mit einer Klaue, die für den automatischen Werkzeugwechsel zusammenarbeiten. Der erste Roboterarm entnimmt das "alte Messer" aus der Spindel und legt es in das Werkzeugmagazin zurück. Der zweite Arm entnimmt ein "neues Werkzeug" aus dem Magazin und setzt es in die Maschinenspindel ein.
5. Die beiden Arme dieser Kardiermaschine können sich hin und her bewegen und in einem bestimmten Winkel kreuzen.
Ein Arm entnimmt das "alte Messer" aus der Spindel und legt es in das Werkzeugmagazin zurück, während der andere Arm das "neue Messer" aus dem Werkzeugmagazin entnimmt und in die Spindel einbaut. Der gesamte Roboterarm kann sich in einer geraden Linie entlang einer Führungsschiene bewegen oder um eine rotierende Welle drehen, um den Transfer der Werkzeuge zwischen Werkzeugmagazin und Spindel zu erleichtern.
6. Doppelarmige stirnseitige Klemmung Roboterarm
Diese Art von Roboterarm unterscheidet sich von den früheren Modellen durch den Mechanismus zum Festhalten des Werkzeugs. Während frühere Modelle von Roboterarmen das Werkzeug durch Klemmen am äußeren Umfang des Werkzeuggriffs festhielten, klemmt dieser Armtyp stattdessen die beiden Endflächen des Werkzeuggriffs.
Drei Schlüsselkomponenten eines Stanzroboterarms
Die wichtigsten Basiskomponenten des Stanzroboterarms beziehen sich auf die wesentlichen Bauteile, aus denen der Arm besteht. Übertragungssystem, das Steuerungssystem und das System zur Mensch-Computer-Interaktion des Roboterarms. Diese Komponenten spielen eine entscheidende Rolle für den Betrieb von Stanzmaschinen und zeichnen sich durch ihre Universalität und ihren modularen Aufbau aus.
Die Komponenten bestehen im Wesentlichen aus drei Teilen: einem hochpräzisen Getriebe, einem leistungsstarken AC/DC-Servomotor und Treiber sowie einer leistungsstarken Robotersteuerung.
1. Reduzierstück
Untersetzungsgetriebe sind die Schlüsselkomponenten von Stanzroboterarmen. Heute werden hauptsächlich zwei Typen verwendet: das Harmonic Gear Reducer und das RV Reducer. Diese Untersetzungsgetriebe werden sowohl an der Basis als auch an den Armgelenken des Stanzroboterarms eingesetzt.
Das Harmonic-Drive-Verfahren wurde von dem amerikanischen Erfinder C. Walt Musser Mitte der 1950er Jahre erfunden. Ein Harmonic Gear Reducer besteht aus drei Hauptbestandteilen: einem Wellengenerator, einem flexiblen Getriebe und einem starren Getriebe. Der Wellengenerator steuert die elastische Verformung des flexiblen Zahnrads, das wiederum mit dem starren Zahnrad kämmt, um Bewegung und Leistung zu übertragen. Das einstufige Übersetzungsverhältnis kann 70 bis 1000 betragen. Die Verformung des flexiblen Zahnrads ermöglicht einen spielfreien Rückwärtseingriff.
Im Vergleich zu anderen Untersetzungsgetrieben ist das Harmonic Gear Reducer leichter und kompakter, mit einer Volumen- und Gewichtsreduzierung von 2/3 bzw. 1/2 bei gleichem Ausgangsdrehmoment. Das flexible Getriebe muss aus einem Material mit hoher Ermüdungsfestigkeit und muss eine komplexe Bearbeitung und Wärmebehandlung durchlaufen, da es großen Wechselbelastungen ausgesetzt ist. Die Leistung des flexiblen Getriebes ist entscheidend für ein hochwertiges Harmonic Gear Reducer.
2. Servomotor und Treiber
Was Servomotoren und -antriebe betrifft, so sind die führenden europäischen Marken Lenz, Lust und Bosch Rexroth. Diese europäischen Motoren und Antriebe zeichnen sich durch eine beeindruckende Überlastfähigkeit, ein dynamisches Ansprechverhalten und eine starke Offenheit der Treiber und Busschnittstellen aus, haben aber auch einen hohen Preis.
Japanische Marken wie Yaskawa, Panasonic und Mitsubishi bieten zwar relativ niedrige Preise, aber es mangelt ihnen an Dynamik und Offenheit, und die meisten von ihnen verfügen nur über analoge Mengen- und Impulssteuerungsmodi.
3. Controller
Was die Steuerungen für Stanzroboterarme anbelangt, so ist die derzeitige Mehrachsen-Steuerungsplattform hauptsächlich in zwei Kategorien unterteilt: Bewegungssteuerungskarten mit eingebetteten Prozessoren (wie DSP und PowerPC) als Kern und SPS-Systeme mit Industriecomputern und Echtzeitsystemen als Kern.
Die Vertreter dieser Kategorien sind die PMAC-Karte von DeltaTau bzw. das TwinCAT-System von Beckhoff.
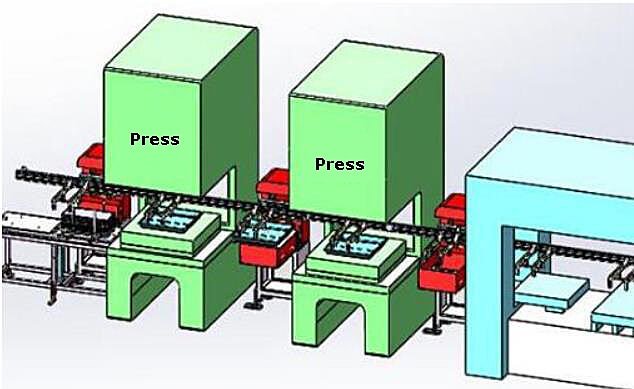
Hauptarbeitsformen des Stanzroboterarms
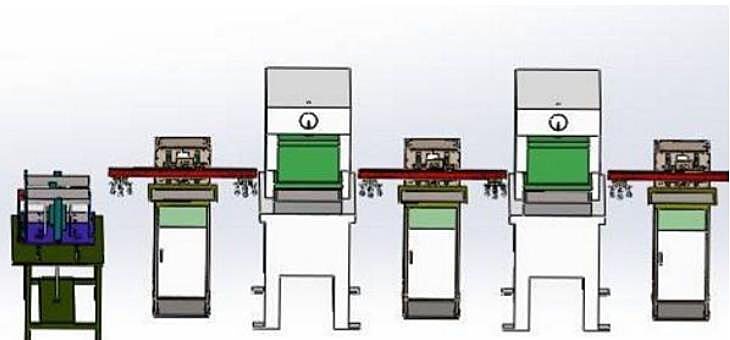
Die Stanzformung von Teilen besteht aus einem oberen und unteren Materialmechanismus und einem Stempel. Die oberen und unteren Prozesse des Stempels sind so ausgelegt, dass sie die Anforderungen an den automatischen Betrieb und die Produktionsbedingungen entsprechend den Anforderungen des Produktionsprozesses erfüllen.
Der Stanzroboterarm spielt eine entscheidende Rolle in der Stanzstraße. Er steuert die Bewegungskoordination zwischen dem Roboterarm und dem Zuführungsdrehtisch und sorgt für ein effizientes Be- und Entladen der Materialien. Der Arm zeichnet sich durch eine stabile Wartung, geringe Reaktionszeit, hohe Zuverlässigkeit und kostengünstige Steuerung aus.
Beim Stanzvorgang führt der Stanzroboterarm automatisch eine Reihe bestimmter Aktionen auf der Grundlage eines vorgewählten Programms aus, wodurch das automatische Einspannen und der Transport von Gegenständen ermöglicht wird. Der Abstand des vom automatischen Zuführungsroboter für jeden Stanzvorgang zugeführten Materials wird als "Zuführungsschritt" bezeichnet, der je nach Form und Größe des Stanzteils und den Anforderungen des Stanzvorgangs festgelegt werden kann.
Der Zyklus ist mit dem Stempel synchronisiert und ermöglicht eine kontinuierliche Produktion. Die Gesamtstruktur ist einfach und kompakt, mit stabiler Übertragung, zuverlässiger Leistung, sicherer Verwendung und bequemer Bedienung. Der Arm ist außerdem leicht zu verarbeiten, zu zerlegen, einzustellen und zu warten und lässt sich wirtschaftlich herstellen.
Es hat ein enormes Anwendungspotenzial in der Kaltfließpressindustrie, insbesondere beim Lagerstempelverfahren.
Antriebsformen des Stanzroboterarms
1. Hydraulisch angetrieben
Der hydraulisch angetriebene Roboterarm von Punch Robotics besteht in der Regel aus Hydraulikkomponenten wie verschiedenen Ölzylindern, Ölmotoren, einem Servoventil, einer Ölpumpe und einem Öltank. Das System wird durch den Aktuator des fahrenden Roboterarms betrieben.
Er verfügt über eine beachtliche Hubkapazität und kann bis zu Hunderte von Kilogramm heben.
Der hydraulisch angetriebene Roboterarm ist bekannt für seine kompakte Struktur, seine Stabilität während des Betriebs, seine Stoßfestigkeit, seine Vibrationsbeständigkeit und seine gute explosionssichere Leistung. Um eine einwandfreie Funktion zu gewährleisten, müssen die hydraulischen Komponenten jedoch mit hoher Genauigkeit gefertigt werden und über starke Dichtungseigenschaften verfügen, um Ölaustritt und Umweltverschmutzung zu verhindern.
2. Pneumatisch angetrieben
Das Antriebssystem des Roboterarms besteht in der Regel aus Zylindern, Luftventilen, Lufttanks und Luftkompressoren.
Dieses System zeichnet sich durch seine bequeme Luftquelle, schnelle Wirkung, einfache Konstruktion, niedrige Kosten und Wartungsfreundlichkeit aus.
Allerdings kann es schwierig sein, die Geschwindigkeit zu kontrollieren, und der Luftdruck sollte nicht zu hoch sein, was zu einer begrenzten Fangkapazität führt.
3. Elektrisch angetrieben
Der elektrische Antrieb des Punch Robotics-Arms ist die am häufigsten verwendete Methode für den Antrieb des Arms.
Er ist bekannt für seine bequeme Stromquelle, die schnelle Reaktionszeit, die starke Antriebskraft (mit einem Gelenkhaltegewicht von bis zu 400 kg), die einfache Signalerfassung und -verarbeitung und die Möglichkeit, eine Reihe flexibler Steuerungsmethoden anzuwenden.
Als Antriebsmotor wird in der Regel ein Schrittmotor verwendet, während Gleichstrom-Servomotoren (AC) die Hauptbetriebsart sind.
Um die hohe Drehzahl des Motors zu bewältigen, muss ein Untersetzungsmechanismus wie z. B. ein harmonischer Antrieb, ein RV-Zykloidenradantrieb, ein Zahnradantrieb, ein Spindelantrieb oder ein Mehrstangenmechanismus eingesetzt werden.
Es gibt jedoch einen zunehmenden Trend zur Verwendung von Motoren mit hohem Drehmoment und niedriger Drehzahl für den Direktantrieb (DD) ohne Untersetzungsgetriebe, was das System vereinfacht und die Regelgenauigkeit verbessert.
4. Mechanisch angetrieben
Der mechanische Antrieb des Punch Robotics-Arms wird nur in Situationen verwendet, in denen eine feste Aktion erforderlich ist.
In der Regel wird ein Nockenschaltwerk verwendet, um die gewünschte Wirkung zu erzielen.
Diese Antriebsmethode ist für ihren zuverlässigen Betrieb, die hohe Arbeitsgeschwindigkeit und die niedrigen Kosten bekannt. Allerdings kann es schwierig sein, Einstellungen vorzunehmen.
Wie kann man mit dem Ausfall eines Stanzroboterarms umgehen?
Obwohl der Punch Robotics-Arm ein Hightech-Produkt ist, können dennoch Probleme auftreten. Falls ein Problem auftritt, können Sie mehrere Schritte unternehmen, um es zu beheben.
Normalerweise gibt es mit dem Punch Robotics-Arm kaum Probleme. Sollten Sie dennoch auf ein Problem stoßen, geraten Sie nicht in Panik. Versuchen Sie zunächst, das Problem mit den vom Hersteller empfohlenen Methoden zu beheben.
Wenn Sie das Problem nicht selbst lösen können, können Sie sich direkt an den Hersteller wenden und um Unterstützung bitten. Alle Punch Robotics-Arme werden mit einer einjährigen Garantie geliefert und bieten einen kontinuierlichen Kundendienst.
Im Falle eines Problems wenden Sie sich am besten direkt an den Hersteller, um eine Lösung zu finden.
1. Prüfen Sie, ob es Störquellen in der Nähe der Steuerelemente des Stanzroboterarms gibt
Wenn das analoge Signal eines Stanzroboterarms instabil ist, ist es ratsam, nach Beseitigung des Problems mit der Signalquelle die Möglichkeit einer Signalstörung in Betracht zu ziehen. Um das Problem zu lösen, müssen Art und Intensität der Störquelle ermittelt werden. Dies kann durch die Installation eines Isolators, die Verwendung von doppelt geschirmten Klebedrähten oder das Hinzufügen eines Erdungspunkts für die Ausrüstung geschehen.
2. Überprüfen Sie alle Strom-, Luft- und Hydraulikquellen des Stanzroboterarms.
Der Stanzroboterarm kann aufgrund von Problemen mit der Stromversorgung, der Luftquelle und der Hydraulikquelle Störungen aufweisen. Um diese Probleme zu beheben, ist es wichtig, die folgenden Punkte zu überprüfen:
Stromversorgung: Vergewissern Sie sich, dass die Spannung des Hauptstromkreises und des Steuerkreises normal ist und dass kein Phasenverlust vorliegt.
Luftquelle: Vergewissern Sie sich entsprechend den Anforderungen an die Luftquelle, dass der Systemdruck normal ist, die Druckluftqualität den Normen entspricht und keine Lecks oder Verstopfungen in der Leitung vorhanden sind.
Hydraulisches System: Prüfen Sie, ob der Systemdruck und die Temperatur im normalen Bereich liegen, ob es Lecks oder Verstopfungen in den Leitungen gibt und ob das System nicht mit Verunreinigungen belastet ist.
3. Überprüfen Sie die Steuerungskomponenten des Stanzroboterarms
Bei Problemen mit dem Stanzroboterarm ist es wichtig, den Motor und das Ventil auf Probleme zu überprüfen, die das Problem verursachen könnten. Diese Probleme sind in der Regel relativ einfach zu identifizieren und zu beheben.
Als Nächstes müssen die Steuerungskomponenten überprüft werden, da diese Defekte schwieriger zu erkennen sein können. Es sollten sorgfältige Messungen und Tests gemäß dem Schaltplan durchgeführt werden, um festzustellen, ob die Betriebsbedingungen der Komponenten normal sind.
Wenn einige Komponenten des Controllers nicht gemessen oder beurteilt werden können, wie z. B. ein FrequenzumformerSie können getestet werden, indem Bauteile ausgetauscht oder durch neue ersetzt werden.
4. Prüfen Sie, ob die Ausrichtung des Sensors oder der geprüften Komponente des Stanzroboterarms versetzt ist
Eine Vernachlässigung des Geräteschutzes durch das Personal kann zu einer falschen Ausrichtung einiger Sensoren führen, z. B. zu einer Fehlausrichtung, zu Fehlfunktionen der Sensoren oder zu Empfindlichkeitsproblemen. Um dies zu verhindern, ist es wichtig, die Ausrichtung und Empfindlichkeit der Sensoren am Stanzroboterarm regelmäßig zu überprüfen und bei Bedarf Anpassungen vorzunehmen. Wenn ein Sensor defekt ist, sollte er sofort ausgetauscht werden.
Außerdem können sich die meisten Sensoren und Erkennungsblöcke aufgrund des ständigen Einsatzes von Automatisierungsgeräten mit der Zeit lockern. Daher ist es wichtig, bei der täglichen Wartung zu überprüfen, ob die Ausrichtung der Sensoren am Stanzroboterarm korrekt und sicher befestigt ist.
Wartung des Stanzroboterarms
Jeder Satz von Stanzroboterarmen muss regelmäßig inspiziert und gewartet werden, und eine bestimmte Person muss für diese Aufgabe verantwortlich sein.
Vergewissern Sie sich jeden Tag vor Arbeitsbeginn, dass der Stanzroboterarm eingeschaltet ist. Die Werkzeugmaschine darf erst in Betrieb genommen werden, wenn ihr normaler Betriebszustand bestätigt wurde.
Legen Sie eine Routine für die regelmäßige Reinigung des Stanzroboterarms fest und achten Sie dabei besonders auf die Reinigung der Filterplatte, um Öl- und Staubablagerungen zu vermeiden. Falls möglich, sollten Sie den Bau einer Schutzabdeckung für den Stanzroboterarm in Erwägung ziehen.
Wenn die Werkzeugmaschine einen Austausch oder eine Fehlersuche an der Matrize erfordert, stellen Sie die Höhe und den Sicherheitsabstand des Stanzroboterarms nach Abschluss dieser Aufgaben auf eine geeignete Position ein.
Stapeln Sie keine Gegenstände in der Nähe der Installation des Stanzroboterarms, um eine mögliche Beschädigung des Arms zu vermeiden.
Eine professionelle Inspektion und Wartung des Stanzroboterarms sollte nach Möglichkeit mindestens einmal im Jahr durchgeführt werden. Wenn der Roboterarm Störungen aufweist, versuchen Sie nicht, ihn ohne Genehmigung zu reparieren, und wenden Sie sich an einen professionellen Techniker.
Presseroboterarm Test
Der erste Probeprüfungsmodus (Modus 1 und Dauermodus) unterstreicht die Bedeutung der Sicherheit im Straßenverkehr.
Hinsichtlich der Anzahl der Nebenstempel gibt es zwei Optionen: Einzelne Multistation und Multiverbindung.
Anmerkung: Der Begriff "hier" bezieht sich sowohl auf eine einzelne Einheit als auch auf mehrere Einheiten. Eine Produktionslinie, die aus mehreren einzelnen Einheiten besteht, fällt jedoch nicht in den Anwendungsbereich dieser Beschreibung.
Es ergeben sich die folgenden vier Quadranten:
Einzelne Installation
Mehrere Installationen
Einzeln Kontinuierlich
Kontinuierlich mehrfach
Der Schwierigkeitsgrad steigt schrittweise an, von der leichtesten bis zur schwersten Stufe.
1. Einzelne Installation
1) Viele Menschen sollten sofort an sechs gemeinsame Roboter denken
Die vier wichtigsten Roboterfamilien in der Branche, KUKA, YASKAWA, ABB und FANUC, sind für ihre Zuverlässigkeit bekannt.
Es ist erwähnenswert, dass Sechsgelenkroboter zwar im Bereich des Schweißens gut etabliert sind, sich aber am besten für Stanzanwendungen eignen.
YASKAWA bietet zum Beispiel sowohl allgemeine als auch spezialisierte Roboter für das Stanzen an. Es ist entscheidend, den spezialisierten Typ für Stanzaufgaben zu wählen.
Diese Spezialroboter sind jedoch aufgrund der verschiedenen Konfigurationen von Getrieben und Motoren mit wesentlich höheren Kosten verbunden.
Anwendungsbereich: Das vielseitigste Feld, mit flexiblen Gestaltungsmöglichkeiten.
Effizienz: Im Durchschnitt können diese Roboter 6-8 Zyklen pro Minute ausführen.
Einige leistungsstarke Modelle erreichen sogar 10 Zyklen pro Minute.
Preis: Trotz ihrer hohen Effizienz haben diese Roboter einen sehr hohen Preis.
2) Einfach Roboterarm
In letzter Zeit ist dieser Robotertyp sehr populär geworden, und es gibt Hunderte von Herstellern in Guangdong, China.
Er hat eine einfache Struktur und niedrige Kosten und kann von zwei Personen bedient werden.
Es ist jedoch anzumerken, dass dieser Robotertyp in Europa, Amerika, Japan und Südkorea nicht erhältlich ist, was die Leistung Chinas unterstreicht, den wirtschaftlichsten und kosteneffektivsten Ersatz für Sechsgelenkroboter im Stanzbereich zu liefern.
Diese Art von Robotern erinnert mich an das Ereignis der Gravitationswellen.
Um es auf den Punkt zu bringen: Dieser Roboter ist nur für Situationen geeignet, in denen Ihr Produkt einmalig ist und in großen Mengen produziert wird.
Es besteht keine Notwendigkeit, die Form häufig zu wechseln oder den Roboterarm zu debuggen.
Wenn nicht, sollten Sie diesen Roboter nicht nur wegen seiner niedrigen Kosten wählen.
Anwendungsbereich: Bekannt für sein flexibles Design, ersetzt er alle klassischen Roboterarme und dominiert den Markt.
Wirkungsgrad: Schwer zu bestimmen.
Preis: So niedrig wie Sie wollen (einige haben den öffentlichen Preis mit 30.000 angegeben).
3) In der Form Roboterarm (klassische Vererbung)
Nachdem wir nun den "neuen Stern" erörtert haben, wollen wir zur Diskussion über das ausgereifte Design übergehen.
Im Allgemeinen wird diese Art von Ausrüstung für die Abwicklung von Aufgaben zwischen mehreren Prozessen einer einzigen Maschine verwendet.
Es ist wichtig zu beachten, dass die mechanische Klaue im Zwischenraum zwischen den Werkzeugstationen positioniert wird, wenn die Presse heruntergedrückt wird. Daher ist es notwendig, bei der Konstruktion ausreichend Platz vorzusehen.
Anwendung: Verwendung bei der Handhabung von Formen.
Wirkungsgrad: 8-10 Zyklen pro Minute.
Preis: Günstig.
2. Mehrfache Installation
1) Link Roboterarm
Dieser Gerätetyp verfügt über eine Verbindungsstange, die durch eine Reihe von Stempeln verläuft, und eignet sich daher ideal zum Verbinden mehrerer Sätze von Stempeln mit geringer Tonnage.
In der Mitte der Presse befindet sich eine Zwischenstation, die den Wendevorgang unterstützen kann.
Anwendung: Verwendung bei der Handhabung von Formen.
Wirkungsgrad: 8-10 Zyklen pro Minute.
Preis: Günstig.
2) Unabhängig Roboterarm
Dieser Gerätetyp eignet sich für die Bearbeitung kleiner Bleche mit einem Stempelabstand von höchstens 1500.
Anwendungsbereiche: Handhabung kleiner Bleche und Verbindung mehrerer Pressen.
Wirkungsgrad: 8-12 Zyklen pro Minute.
Preis: Günstig.
3. Einfach kontinuierlich
1) NC 3D Zweistab Roboterarm
Etwa 70% der Stanzteile in den Industrieländern werden mit dieser einfachen und effizienten Methode bearbeitet.
Derzeit gibt es nur wenige inländische Hersteller von Roboterarmen, die sich in diesem Bereich auszeichnen, insbesondere im High-End-Bereich der inländischen Stanzroboterarme.
Es ist wichtig, bereits zu Beginn des Planungsprozesses die Störkurven der Geräte zu berücksichtigen.
Anwendung: Dieser Gerätetyp hat eine breite Palette von Anwendungen, einschließlich Stanzen mit großer Tonnage und Stanzen mit mehreren Stationen.
Wirkungsgrad: Der Wirkungsgrad hängt stark vom Hub ab und liegt normalerweise zwischen 15 und 40 Zyklen pro Minute.
Preis: Dies ist die kostengünstigste Option.
2) NC 2D zwei Balken Roboterarm
Dieser Gerätetyp hat eine Hubachse weniger als ein dreidimensionaler Roboterarm.
Es ist wichtig, die gleiche horizontale Höhe der verarbeiteten Teile nach der Entformung während des Formdesignprozesses beizubehalten.
Anwendung: Geeignet für Kleinteile wie Batteriegehäuse und Motorgehäuse.
Wirkungsgrad: Die Effizienz wird durch den Prozess stark beeinflusst und kann bei 18650er-Batteriegehäusen 150 Zyklen pro Minute erreichen. Bei Stanzteilen ist es normal, 20-40 Zyklen pro Minute zu absolvieren.
Preis: Günstig.
4. Mehrere kontinuierliche
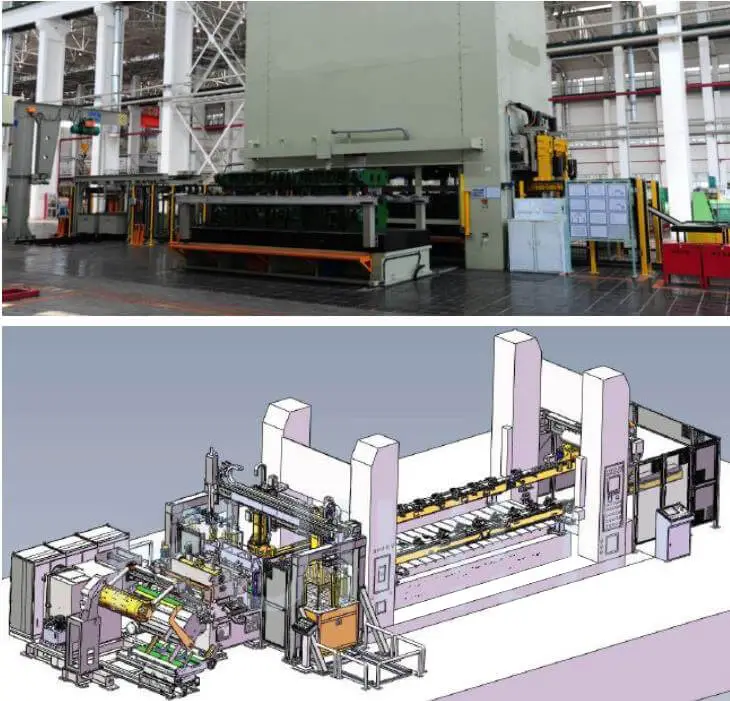
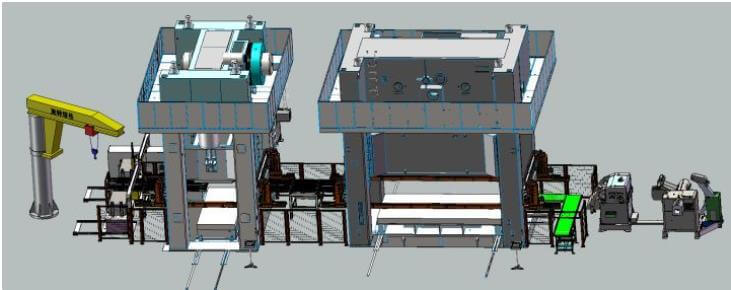
1) Kundenspezifische OEM-Produktionslinie
Hunderte von Milliarden von Produktionslinien blicken ehrfürchtig nach oben, alles wirkt blass.
Als Gründer von MachineMFG habe ich mehr als ein Jahrzehnt meiner Karriere der metallverarbeitenden Industrie gewidmet. Meine umfangreiche Erfahrung hat es mir ermöglicht, ein Experte auf den Gebieten der Blechverarbeitung, der maschinellen Bearbeitung, des Maschinenbaus und der Werkzeugmaschinen für Metalle zu werden. Ich denke, lese und schreibe ständig über diese Themen und bin stets bestrebt, in meinem Bereich an vorderster Front zu bleiben. Lassen Sie mein Wissen und meine Erfahrung zu einem Gewinn für Ihr Unternehmen werden.
Grundlegende Konzepte des computergestützten Entwurfs und der computergestützten Fertigung Der computergestützte Entwurf und die computergestützte Fertigung (CAD/CAM) sind ein umfassendes und technisch komplexes Fachgebiet der Systemtechnik, das verschiedene Bereiche wie die [...]
Konzept der virtuellen Fertigung Die virtuelle Fertigung (VM) ist die grundlegende Umsetzung des tatsächlichen Fertigungsprozesses auf einem Computer. Sie nutzt die Technologien der Computersimulation und der virtuellen Realität, unterstützt durch [...]
Ein flexibles Fertigungssystem (FFS) beruht in der Regel auf den Prinzipien der Systemtechnik und der Gruppentechnologie. Es verbindet CNC-gesteuerte Werkzeugmaschinen (Bearbeitungszentren), Koordinatenmessmaschinen, Materialtransportsysteme, [...]
So wie die Fertigungstechnologie heute in verschiedenen Bereichen eine entscheidende Rolle spielt, nimmt die Nanofabrikationstechnologie eine Schlüsselposition in der Nanotechnologie ein. Die Nanofabrikationstechnologie umfasst zahlreiche Methoden, darunter mechanische [...]
Unter Ultrapräzisionsbearbeitung versteht man Präzisionsfertigungsverfahren, die ein extrem hohes Maß an Genauigkeit und Oberflächenqualität erreichen. Die Definition ist relativ und ändert sich mit den technologischen Fortschritten. Derzeit kann diese Technik [...]
Gegenwärtig kann die spanabhebende Bearbeitung in zwei Gruppen eingeteilt werden, die sich auf die Produktionscharge beziehen: Von diesen beiden Kategorien entfallen auf die erste etwa 70-80% des gesamten Produktionswerts der Zerspanung [...]
In diesem Artikel werden hauptsächlich mehrere ausgereifte spezielle Bearbeitungsmethoden vorgestellt. I. Funkenerosion (EDM) Die Funkenerosion ist ein Verfahren zur Bearbeitung leitfähiger Werkstoffe unter Ausnutzung des Phänomens der elektrischen Korrosion während [...]
Was ist CNC-Bearbeitung? Numerische Steuerung (NC) bezeichnet die Methode zur Steuerung der Bewegung und der Bearbeitungsvorgänge von Werkzeugmaschinen mit Hilfe digitalisierter Informationen. Numerisch gesteuerte Werkzeugmaschinen, oft abgekürzt als [...]
Die spanabhebende Bearbeitung ist nach wie vor die wichtigste Methode der mechanischen Bearbeitung und spielt eine wichtige Rolle in der mechanischen Fertigung. Mit den Fortschritten in der Fertigungstechnik hat die spanende Bearbeitung erhebliche Fortschritte in Richtung [...]
1. Was sind Schweißspannungen Schweißspannungen sind die Spannungen, die während des Schweißprozesses in geschweißten Bauteilen entstehen. Diese Spannung wird durch den thermischen Prozess des Schweißens verursacht und [...]
Als fortschrittliche Werkstoffe werden Materialien bezeichnet, die in jüngster Zeit erforscht wurden oder sich in der Entwicklung befinden und über außergewöhnliche Leistungen und besondere Funktionen verfügen. Diese Materialien sind für den Fortschritt in Wissenschaft und Technik von größter Bedeutung, [...]
Die Wulstumformung eignet sich für verschiedene Arten von Rohlingen, z. B. für tiefgezogene Tassen, geschnittene Rohre und gewalzte konische Schweißteile. Klassifizierung nach dem Medium der Wulstumformung Wulstumformverfahren lassen sich in folgende Kategorien einteilen [...]