Üretimde Motor Tipleri ve Prensiplerinin Keşfedilmesi
Motorların uğultusunun olmadığı bir dünya hayal edin - ne arabalar, ne ev aletleri, ne de endüstriyel makineler. Motorlar elektrik enerjisini mekanik enerjiye dönüştürerek oyuncaklardan üretim devlerine kadar her şeye güç sağlar. Bu makalede çeşitli motor türlerini, çalışma prensiplerini ve uygulamalarını inceleyeceğiz. Bu temel bilgileri anlayarak, bu vazgeçilmez cihazların modern yaşamlarımızı nasıl şekillendirdiği ve endüstriyel alanda ne gibi yeniliklere yol açtığı hakkında fikir sahibi olacaksınız.
Dünyadaki enerji tüketiminin neredeyse yarısı motorlardan kaynaklanmaktadır, bu da motorların verimli kullanımını küresel enerji sorunlarını ele almak için en etkili önlemlerden biri haline getirmektedir.
Motor, elektrik enerjisini mekanik enerjiye dönüştüren bir cihazdır. Dönen bir manyetik alan oluşturmak için bir güç bobini (stator sargısı) kullanır, bu da dönen bir manyetik tork oluşturmak için rotor (sincap kafesli kapalı alüminyum çerçeve gibi) üzerinde hareket eder.
Motorlar, kullanılan güç kaynağının türüne göre doğru akım (DC) motorları ve alternatif akım (AC) motorları olarak ikiye ayrılır. Güç sistemindeki motorların çoğu, senkron veya asenkron (motor stator manyetik alanının dönüş hızı rotor dönüş hızı ile senkronize değildir) olabilen AC motorlardır.
Bir motor temel olarak bir stator ve bir rotordan oluşur. Güç verilen iletkenin manyetik alan içindeki hareket yönü, akımın yönü ve manyetik alan çizgilerinin yönü ile ilgilidir. Bir motorun çalışma prensibi, manyetik alanın akım üzerindeki kuvvetidir ve motorun dönmesine neden olur.
Motor kontrolü, motorun başlatılması, hızlandırılması, çalıştırılması, yavaşlatılması ve durdurulmasının kontrolünü ifade eder. Motor türüne ve motorun kullanıldığı koşullara bağlı olarak farklı gereksinimler ve hedefler vardır. Motorlar için, motor kontrolü yoluyla, hızlı başlatma, hızlı tepki, yüksek verimlilik, yüksek tork çıkışı ve yüksek aşırı yük kapasitesi hedeflerine ulaşılır.
Burada bahsedilen standart motorlar, servomotorlar, step motorlar ve servo motorlar, sıklıkla karşılaştığımız DC mikromotorları ifade eder. "Motor" olarak da bilinen bir motor, Faraday'ın elektromanyetik indüksiyon yasasına göre elektromanyetik enerjinin dönüşümünü veya iletimini sağlayan bu elektromanyetik indüksiyon cihazını ifade eder.
"Elektrikli makine" olarak da bilinen bir motor, güç devresinde İngilizce "M" harfi ile temsil edilir (eskiden "D" ile temsil edilirdi). Ana işlevi, elektrikli aletler veya çeşitli makineler için bir güç kaynağı olarak tahrik torku üretmektir. Bir jeneratör devrede "G" harfi ile temsil edilir.
1. Motor Türleri
Genel olarak motorlar, manyetik bir alanda elektrik akımının akışıyla üretilen kuvveti dönme hareketine ve daha geniş anlamda doğrusal harekete dönüştüren cihazları ifade eder.
Motorlar güç kaynaklarına göre iki kategoride sınıflandırılabilir: DC motorlar ve AC motorlar.
Ayrıca, özel motor türleri için birkaç istisna dışında, dönme prensiplerine göre kabaca kategorize edilebilirler.
(1) DC motor
Fırçalı Motor
Yaygın olarak kullanılan fırçalı motor genellikle DC motor olarak adlandırılır. Rotor, akımı "fırça" adı verilen elektrotlar (stator tarafında) ve bir "komütatör" (armatür tarafında) aracılığıyla değiştirerek döner.
Fırçasız DC Motor
Bu motor fırça veya komütatör gerektirmez, bunun yerine akımları değiştirmek ve motoru döndürmek için transistörler gibi anahtarlama işlevlerini kullanır.
Step Motor
Bu motor darbe gücü ile senkronize olarak çalışır ve bu nedenle darbe motoru olarak da adlandırılır. Karakteristik özelliği kolay ve doğru konumlandırma işlemidir.
(2) AC motor
Asenkron motor
Alternatif akım statorun dönen bir manyetik alan üretmesine neden olur, bu da rotorun indüklenmiş bir akım üretmesine ve etkileşimi altında dönmesine neden olur.
Senkron motor
AC dönen bir manyetik alan yaratır ve manyetik alana sahip rotor çekim nedeniyle döner. Dönüş hızı güç frekansı ile senkronize edilir.
Elektrik Akımı, Manyetik Alanlar ve Kuvvet Hakkında
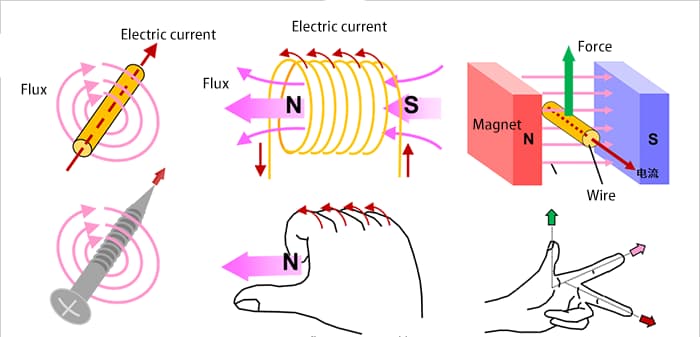
İlk olarak, motor prensiplerinin açıklanmasını kolaylaştırmak için, elektrik akımı, manyetik alanlar ve kuvvetin temel yasalarını gözden geçirelim. Her ne kadar nostalji hissi uyandırsa da, manyetik bileşenleri sık kullanmayan biri bu bilgileri kolayca unutabilir.
Bunu göstermek için resimler ve formüller kullanacağız.
Motor dönüşünün şematik diyagramı
Tel halkası bir dikdörtgen olduğunda, akım üzerine etki eden kuvveti dikkate almamız gerekir.
a ve c kenarlarına etki eden F kuvveti aşağıdaki formülle hesaplanabilir:
Bu, merkezi eksen etrafında bir tork üretir.
Örneğin, dönme açısının sadece θ olduğu durum düşünüldüğünde, b ve d üzerine dik açılarda etki eden kuvvet sinθ'dır. Bu nedenle, a tarafındaki Ta torku aşağıdaki formülle ifade edilebilir:
Aynı şekilde, c tarafı dikkate alındığında, tork iki katına çıkar ve aşağıdaki formülle hesaplanan bir tork oluşturur:
Dikdörtgenin alanı S = h x l olduğundan, bunu yukarıdaki formülde yerine koyduğumuzda aşağıdaki sonuçlar elde edilir:
Bu formül sadece dikdörtgenler için değil, daireler gibi diğer yaygın şekiller için de geçerlidir. Motorlar bu prensibi kullanır.
Standart Motor
Elektrikli oyuncaklar ve elektrikli tıraş makineleri gibi günlük eşyalarda sıklıkla görülen standart bir motor, tipik olarak doğru akım fırçalı bir motordur. Yüksek hız ve düşük tork ile karakterize edilen bu motorun çalışması için yalnızca iki pim gerekir. Bir akünün pozitif ve negatif terminallerine bağlandığında motor dönmeye başlar. Bağlantının tersine çevrilmesi motorun ters yönde dönmesine neden olur.
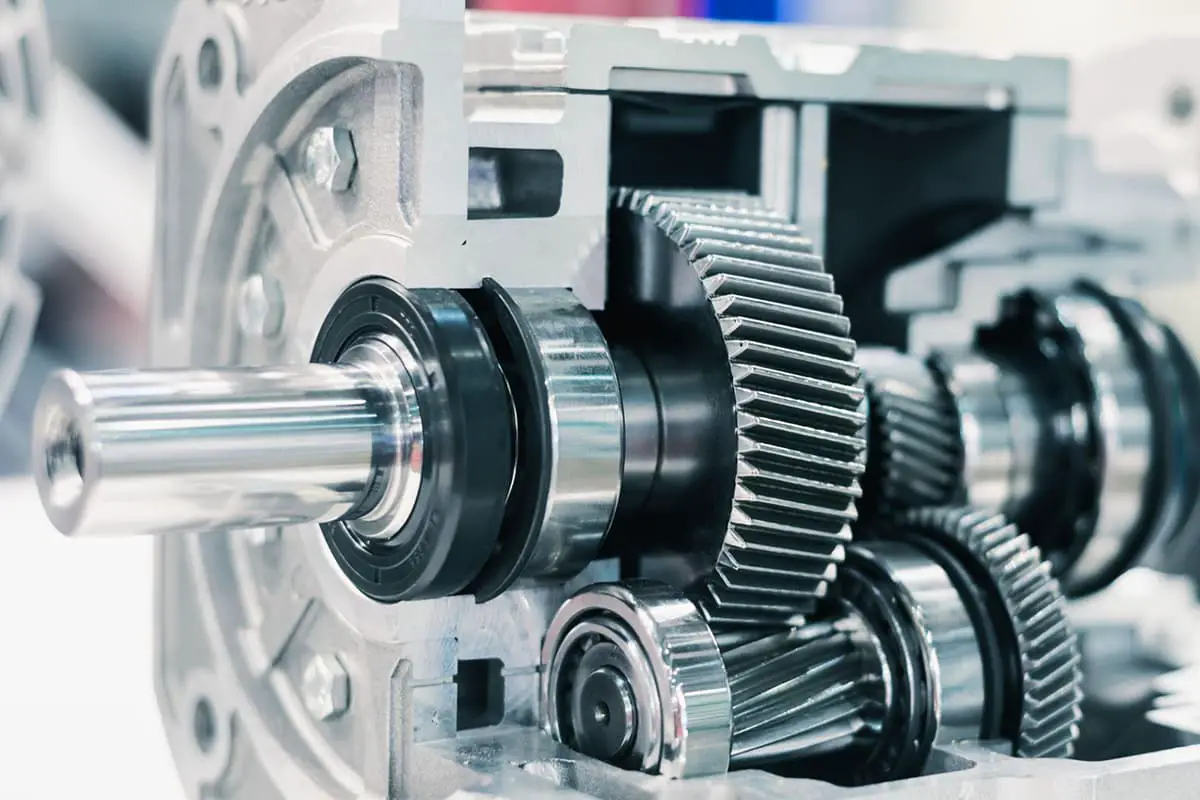
Dişli Redüksiyon Motoru
Dişli redüksiyon motoru, dişli kutusu ile donatılmış standart bir motordur. Bu tasarım, torku artırırken dönme hızını düşürür ve standart motor için pratik uygulama aralığını genişletir.
Servo Motor
Bir servo motor temel olarak bir kabuk, devre kartı, çekirdeksiz motor, dişliler ve konum dedektöründen oluşur. Alıcıdan servo motora bir sinyal alarak çalışır. Yerleşik IC dönüş yönünü belirler ve çekirdeksiz motoru dönmeye başlaması için tahrik eder.
Hareket, redüksiyon dişlileri aracılığıyla salınım koluna iletilir ve konum dedektörü aynı anda istenen konuma ulaşılıp ulaşılmadığını doğrulamak için geri sinyaller gönderir. Konum dedektörü, servo motor döndükçe direnç değerlerini değiştiren değişken bir dirençtir. Bu direnç değerleri tespit edilerek dönüş açısı belirlenebilir.
Tarafından sağlanan özellikler servo motor üreti̇ci̇leri̇ genellikle boyutları (mm), torku (kg/cm), hızı (sn/60°), test voltajını (V) ve ağırlığı (g) içerir. Tork birimi kg/cm'dir ve 1 cm'lik bir salınım kolu uzunluğunda kaç kilogramın kaldırılabileceğini gösterir.
Bu bir kaldıraç kolu kavramıdır, bu nedenle kol ne kadar uzun olursa tork o kadar düşük olur. Hız birimi, servo motorun 60° dönmesi için gereken süreyi temsil eden sn/60°'dir.
Step Motor
Bir step motor, elektrik darbe sinyallerini açısal veya doğrusal yer değiştirmeye dönüştüren bir açık döngü kontrol elemanıdır. Aşırı yük olmayan koşullar altında, motorun hızı ve durma konumu, yük değişikliklerinden bağımsız olarak yalnızca darbe sinyallerinin frekansına ve sayısına bağlıdır.
Bir step sürücü bir darbe sinyali aldığında, step motoru "adım açısı" olarak bilinen sabit bir açıyı önceden belirlenmiş bir yönde döndürmek için tahrik eder. Dönüşü sabit açı artışlarıyla ilerler. Açısal yer değiştirmeyi yönetmek ve hassas konumlandırma sağlamak için darbe sayısı kontrol edilebilir. Benzer şekilde, darbe frekansı motorun dönme hızını ve ivmesini kontrol etmek için kullanılabilir, böylece hız düzenlemesi elde edilir.
Aktüatör motoru olarak da bilinen bir servo motor, otomatik kontrol sistemlerinde bir yürütme birimi olarak görev yapar ve alınan elektrik sinyallerini motor şaftı üzerinde açısal bir yer değiştirme veya açısal hız çıkışına dönüştürür.
İki ana kategoride gelir: doğru akım (DC) ve alternatif akım (AC) servo motorları. Bu motorların temel özelliği, sinyal gerilimi sıfır olduğunda kendi kendine dönme olgusunun olmaması ve tork arttıkça dönme hızının eşit şekilde azalmasıdır.
Servo motorlar öncelikle konumlandırma için darbelere dayanır. Esasen, servo motor alınan her darbe için darbeye karşılık gelen bir açı kadar döner ve böylece yer değiştirmeyi sağlar. Servo motorun kendisi darbe yayma yeteneğine sahip olduğundan, döndüğü her derece için karşılık gelen sayıda darbe yayar.
Bu, alınan darbelerle duyarlı veya 'kapalı döngü' bir sistem oluşturur. Bu şekilde, sistem servo motora kaç darbe gönderildiğini ve kaç darbenin geri alındığını bilir. Sonuç olarak, motorun dönüşünü çok hassas bir şekilde kontrol edebilir ve 0,001 mm'ye kadar hassas konumlandırma sağlar.
Servo motorlar genel olarak AC servo ve DC servo kategorilerine ayrılır.
AC servo motorlar ayrıca asenkron AC servo motorlar ve senkron AC servo motorlar olarak ikiye ayrılır.
DC servo motorlar fırçalı ve fırçasız motorlar olarak ikiye ayrılır. Fırçalı motorlar düşük maliyetlidir, basit yapıdadır, yüksek başlangıç torku üretir, geniş bir hız kontrol aralığına sahiptir ve kontrol edilmesi kolaydır. Bakım gerektirirler, ancak zahmetlidirler (örneğin fırça değişimi) ve elektromanyetik parazit üretirler ve belirli çevresel gereksinimlere sahiptirler. Bu nedenle, maliyete duyarlı genel endüstriyel ve sivil uygulamalar için uygundurlar.
2. Motorlar Nasıl Döner?
1)Motorlar Mıknatıslar ve Manyetik Kuvvet Yardımıyla Döner
Dönen bir şaft ile sabit bir mıknatıs etrafında,
① Mıknatısın döndürülmesi (dönen bir manyetik alan üretmek için),
② Zıt kutuplar birbirini çeker ve aynı kutuplar birbirini iter prensibine göre N kutbu ile S kutbu arasında,
③ Dönen şaftlı mıknatıs dönecektir.
Bu, motor dönüşünün temel prensibidir.
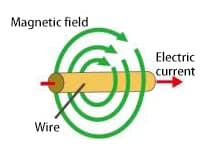
Bir telden geçen akım, telin etrafında dönen bir manyetik alan (manyetik kuvvet) oluşturur ve bu da mıknatısın dönmesine neden olur.
Aslında bu, daha önce açıklandığı gibi aynı operasyonel durumdur.
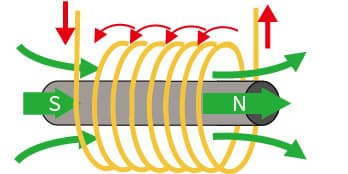
Ayrıca, tel bir bobine sarılırsa, manyetik kuvvetler birleşerek N ve S kutuplarını üreten büyük bir manyetik alan akısı (manyetik akı) oluşturur.
Bobin şeklindeki telin içine bir demir çekirdek yerleştirmek, manyetik alan çizgilerinin geçmesini ve daha güçlü bir manyetik kuvvet oluşturmasını kolaylaştırır.
2)Pratik Dönen Motorlar
Burada, dönen bir motor olarak dönen bir manyetik alan üretmek için üç fazlı AC ve bobinleri kullanmanın pratik yöntemini tanıtacağız.
(Üç fazlı AC, faz farkı 120° olan bir AC sinyalidir).
Yukarıdaki ① durumundaki birleşik manyetik alan aşağıdaki ① şekline karşılık gelir.
Yukarıdaki ② durumundaki birleşik manyetik alan aşağıdaki ② şekline karşılık gelir.
Yukarıdaki ③ durumundaki birleşik manyetik alan aşağıdaki ③ şekline karşılık gelir.
Yukarıda belirtildiği gibi, demir çekirdeğin etrafına sarılan bobin, 120° aralıklarla düzenlenmiş U-fazlı bobin, V-fazlı bobin ve W-fazlı bobin olmak üzere üç faza ayrılmıştır.
Yüksek voltajlı bobin bir N kutbu oluştururken, düşük voltajlı bobin bir S kutbu oluşturur.
Her faz bir sinüs dalgasına göre değişir, bu nedenle her bobinin polaritesi (N kutbu, S kutbu) ve manyetik alanı (manyetik kuvvet) değişecektir.
Bu sırada, bir N kutbu üreten bobine bakarsak, U fazlı bobinden V fazlı bobine, W fazlı bobinden U fazlı bobine sırayla değişerek dönüşe neden olur.
3. Küçük Motorların Yapısı
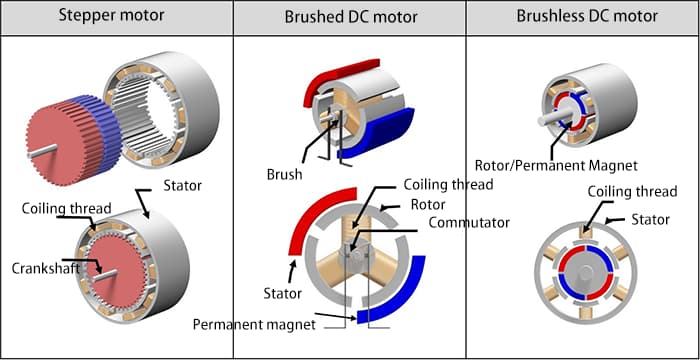
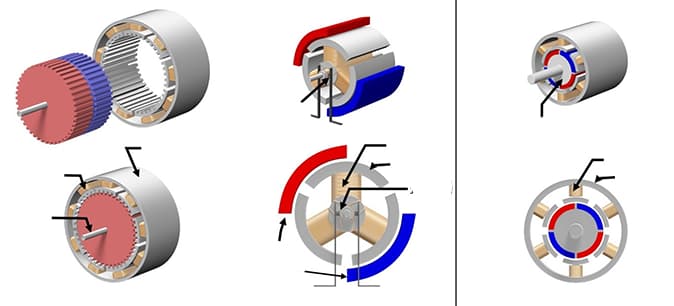
Aşağıdaki şekil üç tip motorun yaklaşık yapılarını ve karşılaştırmalarını göstermektedir: adım motoru, fırçalı DC motor ve fırçasız DC motor.
Bu motorların temel bileşenleri temel olarak bobinler, mıknatıslar ve rotorlardır ve farklı tipleri nedeniyle bobin-sabit tip ve mıknatıs-sabit tip olarak sınıflandırılırlar.
Aşağıda örnek diyagramla ilgili yapısal bir açıklama yer almaktadır. Daha ince bir şekilde böldüğümüzde başka yapılar da olabileceğinden, lütfen bu makalenin genel yapıyı açıkladığını anlayın.
Burada gösterilen adım motorunda bobin dış tarafta sabittir ve mıknatıs iç tarafta döner.
Burada gösterilen fırçalı DC motorda mıknatıs dış tarafta sabittir ve bobin iç tarafta döner. Fırçalar ve komütatör bobine güç sağlamaktan ve akımın yönünü değiştirmekten sorumludur.
Burada gösterilen fırçasız motorda bobin dış tarafta sabittir ve mıknatıs iç tarafta döner.
Farklı motor tipleri nedeniyle, temel bileşenler aynı olsa bile, yapı farklı olabilir. Ayrıntılı açıklama her bölümde verilecektir.
4. Fırçalı Motor
Fırçalı Motorun Yapısı
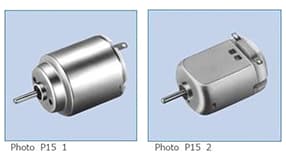
Aşağıda, modellerde sıklıkla kullanılan fırçalanmış bir DC motorun görünümü ve tipik bir iki kutuplu (2 mıknatıs) ve üç yuvalı (3 bobin) motorun patlatılmış bir diyagramı gösterilmektedir. Birçok kişi motorları sökme ve mıknatısları çıkarma konusunda deneyim sahibi olabilir.
Görüldüğü gibi, fırçalı bir DC motorun sabit mıknatısı sabittir ve bobinler motorun iç merkezi etrafında dönebilir. Sabit taraf "stator" olarak adlandırılırken, dönen taraf "rotor" olarak adlandırılır.
Aşağıda, motorun yapısı kavramını temsil eden şematik bir diyagram yer almaktadır.
Dönen merkezi eksenin çevresinde üç komütatör (akımı değiştirmek için kavisli metal plakalar) vardır. Birbirlerine temas etmelerini önlemek için komütatörler 120 derecelik (360 derece ÷ 3) aralıklarla düzenlenmiştir. Komütatörler eksenin dönüşü ile birlikte döner.
Her komütatör bir bobin ucuna ve başka bir bobin ucuna bağlıdır ve üç komütatör ve üç bobin bir bütün olarak (halka şeklinde) bir devre ağı oluşturur.
İki fırça komütatörlere temas etmek üzere 0° ve 180°'de sabitlenmiştir. Harici DC güç kaynağı fırçalara bağlanır ve akım fırça → komütatör → bobin → fırça yolu boyunca akar.
Fırçalı motorun çalışma prensibi.
① Başlangıç Durumundan Saat Yönünün Tersine Dönüş
İlk durumda, Bobin A en üsttedir ve güç kaynağı sol (+) ve sağ (-) tarafları tanımlanmış fırçalara bağlıdır. Sol fırçadan komütatör aracılığıyla Bobin A'ya büyük bir akım akar ve Bobin A'nın üst (dış) tarafı bir S kutup yapısı haline gelir.
A bobininden sol fırçadan B ve C bobinlerine doğru akan akımın yarısı A bobininin ters yönünde olduğundan, B ve C bobinlerinin dış tarafı daha zayıf bir N kutbu haline gelir (diyagramda daha küçük harflerle temsil edilir).
Bu bobinlerde oluşan manyetik alanlar ve mıknatıslar arasındaki itme ve çekme kuvveti bobinin saat yönünün tersine dönmesine neden olur.
② Saat Yönünün Tersine Daha Fazla Dönüş
Bobin A'nın saat yönünün tersine 30 derecelik bir dönüş durumunda olduğunu varsayarsak, sağ fırça iki komütatöre temas eder.
A bobinindeki akım sol fırçadan sağ fırçaya doğru akmaya devam eder ve A bobininin dış tarafı S kutbu olarak kalır.
A bobinindeki akımın aynısı B bobininden de geçer ve B bobininin dış tarafı daha güçlü bir N kutbu haline gelir.
C bobininin her iki ucu fırçalar tarafından kısa devre edildiğinden akım akmaz ve manyetik alan oluşmaz.
Bu durumda bile bobin saat yönünün tersine bir dönme kuvvetine maruz kalır.
③'den ④'e kadar, üst bobin sola doğru bir kuvvete maruz kalmaya devam eder ve alt bobin sağa doğru bir kuvvete maruz kalmaya devam ederek saat yönünün tersine dönmeye devam eder.
Bobin ③ ve ④ durumlarına her 30 derece döndüğünde, bobinin dış tarafı, bobin merkez yatay eksenin üzerinde yer aldığında bir S kutbu ve bobin altında yer aldığında bir N kutbu haline gelir ve bu hareketi tekrar tekrar gerçekleştirir.
Başka bir deyişle, üst bobin tekrar tekrar sola doğru bir kuvvet alır ve alt bobin tekrar tekrar sağa doğru bir kuvvet alır (her ikisi de saat yönünün tersine). Bu da rotorun sürekli olarak saat yönünün tersine dönmesine neden olur.
Güç kaynağı ters sol fırçaya (-) ve sağ fırçaya (+) bağlanırsa, bobin ters yönde bir manyetik alan oluşturur ve bobine uygulanan kuvvetin yönü tersine dönerek saat yönünde dönüşe neden olur.
Ayrıca, güç kaynağı bağlantısı kesildiğinde, fırçalı motorun rotoru dönmeyi durdurur çünkü dönmesini sağlayacak manyetik alan yoktur.
5. Üç Fazlı Tam Dalga Fırçasız Motor
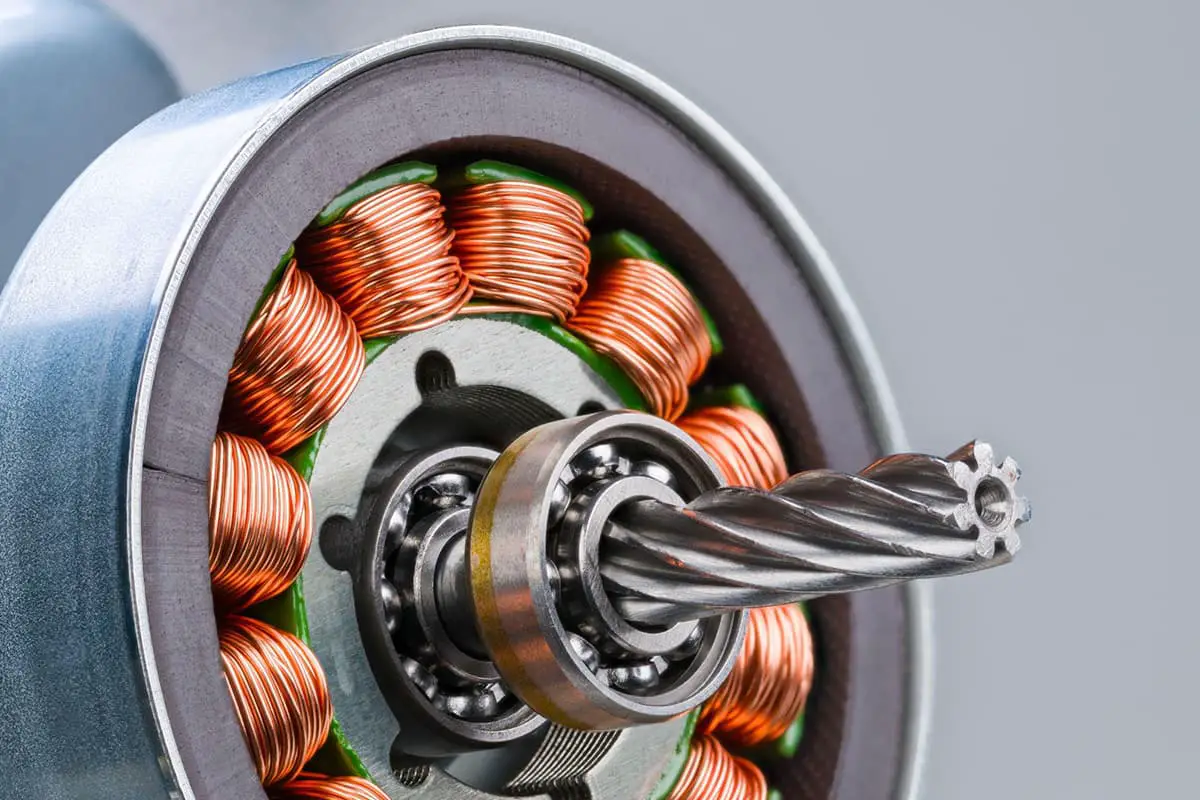
Üç Fazlı Tam Dalga Fırçasız Motorun Görünümü ve Yapısı
Aşağıdaki şekilde fırçasız bir motorun görünümü ve yapısının bir örneği gösterilmektedir.
Solda, bir disk oynatma cihazında diskleri döndürmek için kullanılan bir mil motoru örneği görülmektedir. Üç faz çarpı üçten oluşan toplam dokuz bobin vardır.
Sağda, bir FDD cihazı için 12 bobinli (üç faz çarpı dört) bir mil motoru örneği görülmektedir. Bobinler devre kartı üzerine sabitlenmiş ve bir demir çekirdek etrafına sarılmıştır.
Bobinin sağındaki disk şeklindeki bileşen sabit mıknatıslı bir rotordur. Dış kenar kalıcı bir mıknatıstan yapılmıştır ve rotor mili bobinin merkezine yerleştirilir ve bir kısmını kaplar. Sabit mıknatıs bobinin dış kenarı etrafında döner.
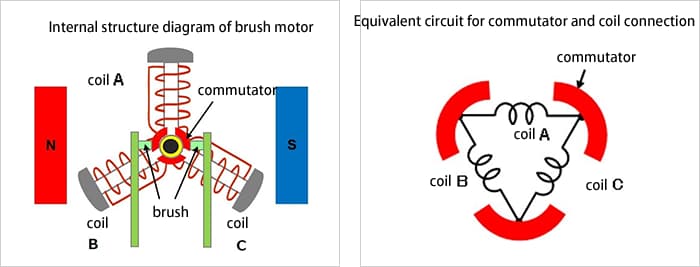
Üç fazlı tam dalga fırçasız motorun iç yapı şeması ve bobin bağlantıları için eşdeğer devre.
Aşağıda, bobin bağlantıları için iç yapı ve eşdeğer devrenin basitleştirilmiş diyagramları verilmiştir.
Basitleştirilmiş diyagram, basit bir yapıya sahip 2 kutuplu (2 mıknatıs) 3 yuvalı (3 bobin) bir motoru göstermektedir. Fırçalanmış bir motora benzer motor yapısı Aynı sayıda kutup ve yuvaya sahiptir, ancak mıknatıslar dönebilirken bobin tarafı sabittir. Tabii ki fırça yoktur.
Bu durumda, bobinler Y şeklinde bir konfigürasyonda bağlanır ve bobinlere akım sağlamak için yarı iletken bileşenler kullanılır. Akım akışı, dönen mıknatısların konumuna göre kontrol edilir.
Bu örnekte, mıknatısların konumunu tespit etmek için Hall elemanları kullanılmaktadır. Hall elemanları bobinlerin arasına yerleştirilmiştir ve konum bilgisi olarak kullanılan manyetik alan gücü tarafından üretilen voltajı algılar. Daha önce verilen FDD cihazı için mil motorunun görüntüsünde, Hall elemanları konum tespiti için bobinler arasında da görülebilir (bobinlerin üstünde).
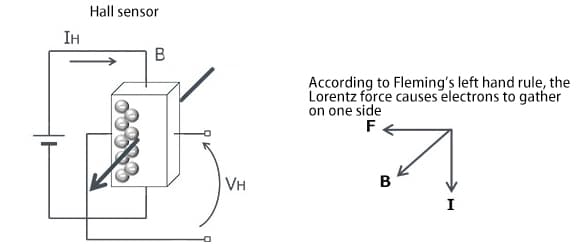
Hall elemanları, manyetik alanın boyutunu voltajın boyutuna dönüştüren ve manyetik alanın yönünü pozitif veya negatif voltajla temsil eden iyi bilinen manyetik sensörlerdir.
Aşağıda Hall etkisini gösteren şematik bir diyagram yer almaktadır.
Hall elemanı, "bir akım IH bir yarı iletkenden geçtiğinde ve bir manyetik akı B akıma dik olarak geçtiğinde, hem akıma hem de manyetik alana dik yönde bir VH voltajı üretilir" olgusunu kullanır. Amerikalı fizikçi Edwin Herbert Hall bu olguyu keşfetmiş ve "Hall etkisi" olarak adlandırmıştır. Üretilen VH gerilimi aşağıdaki formülle ifade edilir:
VH = (KH / d)・IH・B
KH: Hall katsayısı, d: manyetik akı nüfuz yüzeyinin kalınlığı
Formülde gösterildiği gibi, akım ne kadar yüksekse voltaj da o kadar yüksek olur. Bu özellik genellikle rotorun (mıknatısın) konumunu tespit etmek için kullanılır.
Üç fazlı tam dalga fırçasız motorların dönme prensibi
Fırçasız motorun dönme prensibi şimdi 1'den 6'ya kadar olan adımlarda açıklanacaktır. Anlaşılmasını kolaylaştırmak için, sabit mıknatıs dairesel bir şekilden dikdörtgen bir şekle basitleştirilmiştir.
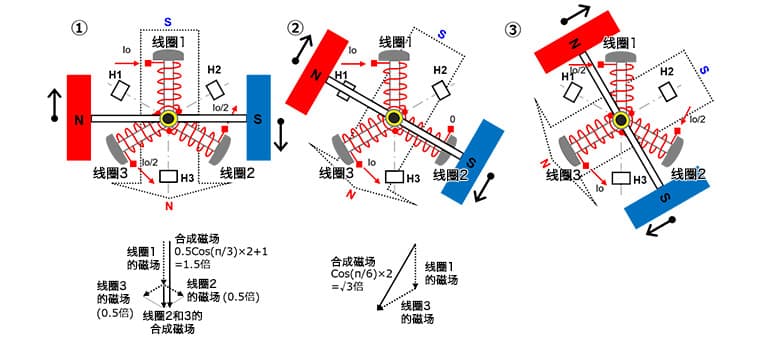
① Üç fazlı bir bobin sisteminde, bobin 1 saat 12 pozisyonunda, bobin 2 saat 4 pozisyonunda ve bobin 3 saat yüzünde saat 8 pozisyonunda sabitlenmiştir. N kutbu solda ve S kutbu sağda olan 2 kutuplu bir sabit mıknatıs dönebilir.
Bobinin dışında bir S kutuplu manyetik alan oluşturmak için bobin 1'den bir Io akımı geçirin. Bobinin dışında bir N kutuplu manyetik alan oluşturmak için bobin 2 ve 3'ten Io/2'lik bir akım geçirin.
Bobin 2 ve 3'ün manyetik alanları vektörel olarak birleştirildiğinde, aşağıya doğru bakan bir N kutuplu manyetik alan üretilir. Bu manyetik alan, tek bir bobinden geçen akım Io tarafından üretilen manyetik alanın 0,5 katıdır ve bobin 1'in manyetik alanına eklendiğinde 1,5 kat daha güçlü hale gelir. Bu, sabit mıknatısa dik birleşik bir manyetik alan üretir, bu da maksimum tork üretir ve sabit mıknatısın saat yönünde dönmesine neden olur.
Dönme konumuna bağlı olarak bobin 2'den geçen akım azaldıkça ve bobin 3'ten geçen akım arttıkça, birleşik manyetik alan da saat yönünde dönerek sabit mıknatısın dönmeye devam etmesine neden olur.
② 30 derece döndürülmüş durumda, bobin 1'den bir Io akımı geçerek bobin 2'deki akımı sıfır yapar ve bobin 3'ten Io akımının akmasına neden olur.
Bobin 1'in dış kısmı bir S kutbu ve bobin 3'ün dış kısmı bir N kutbu haline gelir. Vektörel olarak birleştirildiğinde, üretilen manyetik alan tek bir bobinden geçen akım Io tarafından üretilen manyetik alandan √3 (≈1,72) kat daha güçlüdür. Bu aynı zamanda saat yönünde dönen sabit mıknatısa dik birleşik bir manyetik alan üretir.
Dönüş konumu değiştikçe, bobin 1'e akan akım azalır, bobin 2'ye akan akım sıfırdan başlar ve artar ve bobin 3'ten akan akım Io'ya yükselir. Sonuç olarak, birleşik manyetik alan da saat yönünde dönerek sabit mıknatısın dönmeye devam etmesine neden olur.
Her bir faz akımının bir sinüs dalgası olduğu varsayıldığında, buradaki akım değeri Io × sin(π⁄3) = Io × √3⁄2'dir. Manyetik alanların vektörel kombinasyonu sayesinde, toplam manyetik alan büyüklüğü tek bir bobin tarafından üretilen manyetik alanın 1,5 katıdır.
Her faz akımı bir sinüs dalgası olduğunda, sabit mıknatısın konumundan bağımsız olarak, vektörel olarak birleştirilmiş manyetik alanın büyüklüğü her zaman tek bir bobin tarafından üretilen manyetik alanın 1,5 katıdır ve manyetik alan sabit mıknatısın manyetik alanına 90 derecelik bir açıyla diktir.
③ 30 derecelik sürekli bir dönüşte, bobin 1'den Io/2'lik bir akım akar, bobin 2'den Io/2'lik bir akım akar ve bobin 3'ten Io'luk bir akım akar.
Bobin 1'in dışı bir S kutbu haline gelir, bobin 2'nin dışı da bir S kutbu haline gelir ve bobin 3'ün dışı bir N kutbu haline gelir. Vektörel olarak birleştirildiğinde, üretilen manyetik alan, tek bir bobinden Io akımı geçtiğinde üretilen manyetik alanın 1,5 katıdır (adım 1'de olduğu gibi). Bu aynı zamanda sabit mıknatısın manyetik alanına 90 derecelik açıyla dik ve saat yönünde dönen birleşik bir manyetik alan üretir.
④-⑥
1-3. adımlarla aynı şekilde döndürmeye devam edin.
Bu şekilde, bobinlere akan akım sürekli olarak sabit mıknatısın konumuna bağlı olarak değiştirilirse, sabit mıknatıs sabit bir yönde dönecektir. Benzer şekilde, akımın ters yönde akması sağlanırsa ve birleşik manyetik alanın yönü tersine çevrilirse, dönüş saat yönünün tersine olacaktır.
Aşağıdaki diyagram 1'den 6'ya kadar her bir adım için her bir bobinden geçen akımı göstermektedir.
Yukarıdaki açıklama sayesinde, akım değişiklikleri ve rotasyon arasındaki ilişki artık anlaşılmış olmalıdır.
6. Step Motor
Step motor, bir darbe sinyali ile senkronize edilerek dönüş açısı ve hızı açısından hassas bir şekilde kontrol edilebilen bir motor türüdür. Step motorlar "darbe motorları" olarak da bilinir.
Konum sensörleri kullanmadan ve yalnızca açık döngü kontrolü ile doğru konumlandırma elde etme yetenekleri nedeniyle, step motorlar konumlandırma gerektiren ekipmanlarda yaygın olarak kullanılmaktadır.
Step Motorun Yapısı (İki fazlı bipolar)
Aşağıdaki resimler soldan sağa doğru bir step motorun görünümünü, iç yapısının şematik bir diyagramını ve yapısının kavramsal bir diyagramını göstermektedir.
Görünüm örneğinde, hem HB (hibrit) hem de PM (sabit mıknatıslı) tip step motorlar gösterilmektedir. Ortadaki şematik diyagram da hem HB hem de PM tiplerinin yapısını göstermektedir.
Bir step motor, bobinlerin sabit olduğu ve sabit mıknatısın döndüğü bir yapıya sahiptir. Sağdaki step motorun iç yapısının kavramsal diyagramı, iki fazlı (iki set) bobinlere sahip bir PM motor örneğidir.
Step motorun temel yapısı örneğinde bobinler dışta, sabit mıknatıs ise içte olacak şekilde düzenlenmiştir. İki fazlı tipin yanı sıra üç fazlı ve beş fazlı gibi daha fazla faza sahip tipleri de bulunmaktadır.
Bazı step motorlar farklı yapılara sahiptir, ancak step motorların temel çalışma prensibini açıklamak adına, bu makale sabit bobinler ve dönen sabit mıknatısların temel yapısına sahip step motoru sunmaktadır.
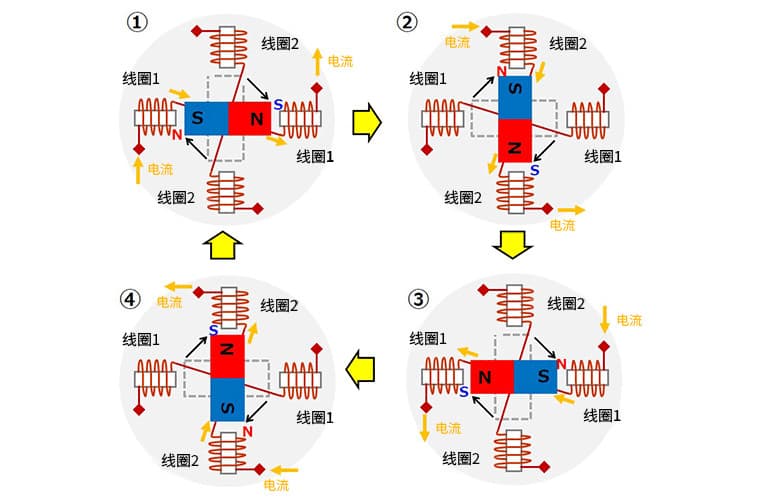
Aşağıdaki diyagram step motorun temel çalışma prensibini açıklamak için kullanılmaktadır. Bu, bir önceki resimde gösterilen iki fazlı bipolar bobinlerin her bir fazının (bir bobin seti) ①'den ④'e bir durum değişikliği varsayılarak bir uyarma örneğidir. Bobinler 1 ve 2 numaralı bobinlerden oluşmaktadır ve akım oku akım akış yönünü göstermektedir.
①
Elektrik akımı bobin 1'in sol tarafından akar ve sağ tarafından çıkar.
Bobin 2'den elektrik akımı geçmesine izin vermeyin.
Bu noktada, sol bobin 1'in içi Kuzey, sağ bobin 1'in içi ise Güney olur.
Sonuç olarak, ortadaki sabit mıknatıs bobin 1'in manyetik alanı tarafından çekilir ve sol tarafın Güney ve sağ tarafın Kuzey olduğu bir durumda durur.
②
Bobin 1'deki akımı durdurun ve akımın bobin 2'nin üstünden akmasına ve altından çıkmasına izin verin.
Üst bobin 2'nin içi Kuzey, alt bobin 2'nin içi ise Güney olur.
Sabit mıknatıs manyetik alanı tarafından çekilir ve saat yönünde 90° döner ve durur.
③
Bobin 2'deki akımı durdurun ve akımın bobin 1'in sağ tarafından akmasına ve sol tarafından çıkmasına izin verin.
Sol bobin 1'in içi Güney, sağ bobin 1'in içi ise Kuzey olur.
Sabit mıknatıs manyetik alanı tarafından çekilir ve saat yönünde 90° daha dönerek durur.
④
Bobin 1'deki akımı durdurun ve akımın bobin 2'nin altından akmasına ve üstünden çıkmasına izin verin.
Üst bobin 2'nin içi Güney, alt bobin 2'nin içi ise Kuzey olur.
Sabit mıknatıs manyetik alanı tarafından çekilir ve saat yönünde 90° daha dönerek durur.
Bobinlerden geçen akımı elektronik devreler kullanarak ① ila ④ adımları sırasına göre değiştirerek step motor döndürülebilir. Bu örnekte, her bir anahtarlama eylemi step motoru 90° döndürür.
Ek olarak, belirli bir bobinden sürekli olarak akım akıtarak, step motor durma konumunu koruyabilir ve tutma torkuna sahip olabilir. Bobinlerden akan akımın sırasını tersine çevirmenin step motorun ters yönde dönmesini sağlayabileceğini belirtmek gerekir.
MachineMFG'nin kurucusu olarak, kariyerimin on yıldan fazlasını metal işleme sektörüne adadım. Kapsamlı deneyimim, sac metal imalatı, talaşlı imalat, makine mühendisliği ve metaller için takım tezgahları alanlarında uzman olmamı sağladı. Bu konular hakkında sürekli düşünüyor, okuyor ve yazıyorum, sürekli olarak alanımın ön saflarında kalmaya çalışıyorum. Bilgi ve uzmanlığımın işiniz için bir değer olmasına izin verin.
Bir elektrik motorunun aşırı ısınmadan sorunsuz çalışmasını sağlayan şeyin ne olduğunu hiç merak ettiniz mi? Motorlar için güvenli çalışma sıcaklıklarını anlamak, uzun ömürlülükleri ve performansları açısından çok önemlidir. Bu makalede...
Endüstriyel otomasyonun hızlı dünyasında servo motorlar, hassasiyet ve verimlilik sağlayan isimsiz kahramanlardır. Ancak dikkat çekmek için yarışan sayısız üretici varken, hangilerinin daha iyi olduğunu nasıl bilebilirsiniz?
Ekskavatörlerin ve diğer ağır makinelerin güçlü görevlerini nasıl yerine getirdiklerini hiç merak ettiniz mi? Bu makalede, hidrolik pompalar ve motorlar arasındaki büyüleyici farkları keşfedeceğiz. Nasıl olduğunu öğreneceksiniz...
Makinelerin hassas hareketleri nasıl gerçekleştirdiğini hiç merak ettiniz mi? Bu blog, servo motor kontrol modlarının büyüleyici dünyasına dalıyor. Darbeli kontrolden analog kontrole kadar her bir yöntemin nasıl çalıştığını keşfedeceğiz...
Trenlerin rayların üzerinde nasıl yüzebildiğini veya robotların hassas hareketleri nasıl gerçekleştirdiğini hiç merak ettiniz mi? Bu makale lineer motorların büyüleyici dünyasını gözler önüne seriyor; prensiplerini, türlerini ve benzersiz avantajlarını açıklıyor....
Projeniz için mükemmel motoru nasıl seçeceğinizi hiç merak ettiniz mi? Anahtar, DC, asenkron ve senkron motor türlerini ve bunların benzersiz avantajlarını anlamakta yatmaktadır. Bu makale motorların...
Motor yatakları neden bu kadar ısınır ve bu konuda ne yapılabilir? Bu makalede, aşırı yükler ve kötü çalışma koşullarından motor rulmanlarında ısı oluşumunun nedenlerine...
Bir motorun manyetik dengesi bozulduğunda ne olur? Tek taraflı manyetik çekme, motorlardaki dengesiz hava boşluğu nedeniyle meydana gelir ve motor yataklarını zorlayan eşit olmayan kuvvetlere neden olur. Bu makale...
Rulmanlar helisel dişli motorların verimliliğini ve dayanıklılığını nasıl etkiler? Bu makalede rulmanların kritik rolü ele alınmakta, rulmanların seçimi ve düzenlenmesi ile rulmanların...