Erforschung der Schwingungsschwelle für Elektromotorlager
Wie bestimmt man den maximalen Schwingungspegel für Elektromotorlager? Diese wichtige Frage betrifft sowohl die Betriebsgrenzen als auch die Prüfung nach der Installation. Der Artikel befasst sich mit internationalen und nationalen Normen für Schwingungsgrenzwerte, berücksichtigt Belastungsbedingungen und erörtert praktische Messverfahren. Nach der Lektüre werden Sie die Faktoren verstehen, die die Motorschwingungen beeinflussen, und lernen, wie Sie diese Schwingungen unter verschiedenen Betriebsbedingungen genau messen und interpretieren können.
Häufig wird gefragt, wie hoch die maximale Schwingung eines Motorlagers sein darf. Diese Frage könnte eigentlich auf zwei Dinge abzielen. Erstens, wie hoch ist die maximale Vibration, unter der ein Motorlager arbeiten kann, und zweitens, wie hoch sollte die maximale Vibration sein, nachdem der Motor installiert und auf Vibration getestet wurde.
Im ersten Fall kann man die Lagerauswahl überprüfen und berechnen, indem man die Umgebungsschwingungen als Stoßbelastung betrachtet. In der Tat fragen die meisten Freunde nach der zweiten Frage, d. h. nach dem maximalen Schwingungswert des Motors und des Lagers als Ganzes während des Betriebs des Motorlagers. Lassen Sie uns dies hier diskutieren.
Für die Grenzwerte von Motorlagerschwingungen gibt es viele entsprechende internationale Normen und nationale Standards. Da wir über Normen verfügen, warum haben viele Menschen immer noch Probleme mit den Grenzwerten? Die häufigste Frage ist: Gelten diese Grenzwerte für Leerlauf oder Volllast? Handelt es sich bei diesen Grenzwerten um den Effektivwert oder um andere Werte?
Betrachten wir zunächst ISO2372, wie in der folgenden Abbildung dargestellt:
Grenzwerte für den Schwerebereich von Schwingungen (Geschwindigkeit)
Schwingungsstärkenbereiche für Maschinen, die zu: gehören
Aus ISO 2372
In/Sec(PK)
MM/Sec(RMS)
Klasse I
Klasse II
Klasse III
Klasse IV
<20HP
20-100 PS
>100HP
>100HP
0.015
0.28
A
A
A
A(Gut)
0.025
0.45
0.039
0.71
B
B
B
B(Erlaubt)
0.062
1.12
0.099
1.8
C
C
C
C(Tolerierbar)
0.154
2.8
0.248
4.5
D
D
D
D(Nicht zulässig)
0.392
7.1
0.617
11.2
0.993
18
1.54
28
2.48
45
3.94
71
In der Tabelle ist leicht zu erkennen, dass die Einheiten der Schwingungsintensität, einschließlich des Effektivwerts der Geschwindigkeit und des Spitzenwerts der Verschiebung, auf der linken Seite aufgeführt sind.
Es stellt sich also die Frage, ob ein Ingenieur einen Motor unter Leerlauf- oder Volllastbedingungen messen sollte. Nach unserem Verständnis von Motorlagern hat die Drehmomentbelastung des Motors selbst, ob im Leerlauf oder unter Volllast, keinen wesentlichen Einfluss auf die Lager.
Aus Sicht der Lager ist es daher unerheblich, ob der Motor im Leerlauf oder unter Volllast läuft. Dabei wird jedoch der Stator des Motors nicht berücksichtigt. Unter tatsächlichen Arbeitsbedingungen können der Zustand des Motorstators und die Last die Gesamtschwingung des Motorkörpers beeinflussen. Beachten Sie, dass es sich hierbei nicht um die Lagerschwingung, sondern um die Gesamtschwingung handelt.
Daher gibt es bei der Messung eines Motors einen Unterschied zwischen Leerlauf und Volllast. Dies muss bei den eigentlichen Messungen berücksichtigt werden.
Gemäß ISO10816 sollten die Schwingungen von Geräten unter allen möglichen zu erwartenden Betriebszuständen getestet werden, wobei der bei den Tests ermittelte Höchstwert als repräsentativ für die Schwingungsintensität gilt.
Mit anderen Worten, der Höchstwert wird aus allen Betriebszuständen des Geräts ermittelt. Zu diesen Zuständen gehören nicht nur Leerlauf und Volllast, sondern bei strengeren Überlegungen können auch andere Zwischenzustände berücksichtigt werden.
Der Grund für diese Bestimmung in der Norm ist die Berücksichtigung des maximalen Schadens, den Vibrationen an der Ausrüstung anrichten können, und die Festlegung der maximal zulässigen Vibrationsstärke. (Wenn Ingenieure dieses Prinzip verstehen, wissen sie, warum für Schwingungen mit niedriger Geschwindigkeit die Verschiebung, für Schwingungen mit mittlerer Geschwindigkeit die Geschwindigkeit und für Schwingungen mit hoher Geschwindigkeit die Beschleunigung gewählt wird).
Natürlich beziehen sich die vorgenannten Angaben auf die Schwingungsstärke von allgemeinen Geräten. Für Motoren gibt es einige detailliertere Normen.
Die Norm GB/T 5171.1-2014 beispielsweise legt die Grenzwerte für die Nenndrehzahl von kleinen Stromrichtermotoren im Leerlauf fest. Die Norm definiert eindeutig, dass das Messobjekt die Leerlaufschwingung ist. Daher muss nach dieser Norm nur die Leerlaufschwingung berücksichtigt werden.
In der Praxis können Ingenieure in Motorenfabriken Motorschwingungen anhand der entsprechenden Motornormen messen. Bei der Auswahl geht es nicht nur darum, die Tabellen in den Normen zu lesen, die begleitenden Erklärungen innerhalb der Normen können sehr entscheidend sein. Wenn eine bestimmte Motortyp keine entsprechende Norm hat, sollte sie zumindest den Bestimmungen für allgemeine Geräte in ISO 2371 entsprechen.
Abgesehen von den Vorschriften in den oben genannten Normen muss das Motorenwerk, wenn ein Motorbenutzer einen Grenzwert für Motorschwingungen vorgibt, gemäß den Normen des Kunden messen.
Als Gründer von MachineMFG habe ich mehr als ein Jahrzehnt meiner Karriere der metallverarbeitenden Industrie gewidmet. Meine umfangreiche Erfahrung hat es mir ermöglicht, ein Experte auf den Gebieten der Blechverarbeitung, der maschinellen Bearbeitung, des Maschinenbaus und der Werkzeugmaschinen für Metalle zu werden. Ich denke, lese und schreibe ständig über diese Themen und bin stets bestrebt, in meinem Bereich an vorderster Front zu bleiben. Lassen Sie mein Wissen und meine Erfahrung zu einem Gewinn für Ihr Unternehmen werden.
Stellen Sie sich vor, Sie könnten die Präzision von Werkzeugmaschinen mit einer einfachen Glasoberfläche erreichen. Lineare Gittermaßstäbe tun genau das, indem sie feine Linien in hochgenaue Messungen umwandeln. In diesem Artikel wird untersucht, wie diese...
Mit welcher Art von Fragen können Sie ein Vorstellungsgespräch im Maschinenbau gewinnen? Dieser Artikel befasst sich mit den 20 wichtigsten Fragen, die verschiedene Aspekte des Maschinenbaus testen, von...
Haben Sie schon einmal über die Vielseitigkeit von Federn im Maschinenbau gestaunt? Von Fahrzeugaufhängungen bis hin zu Präzisionsinstrumenten spielen diese unbesungenen Helden eine entscheidende Rolle. In diesem Blogbeitrag werden wir...
Läuft Ihr Hydrauliksystem nicht wie erwartet? Wenn Sie wissen, wie Sie die Effizienz von Hydraulikpumpen berechnen können, kann das den Ausschlag geben. Dieser Artikel gliedert den Prozess in einfache Schritte und hilft Ihnen,...
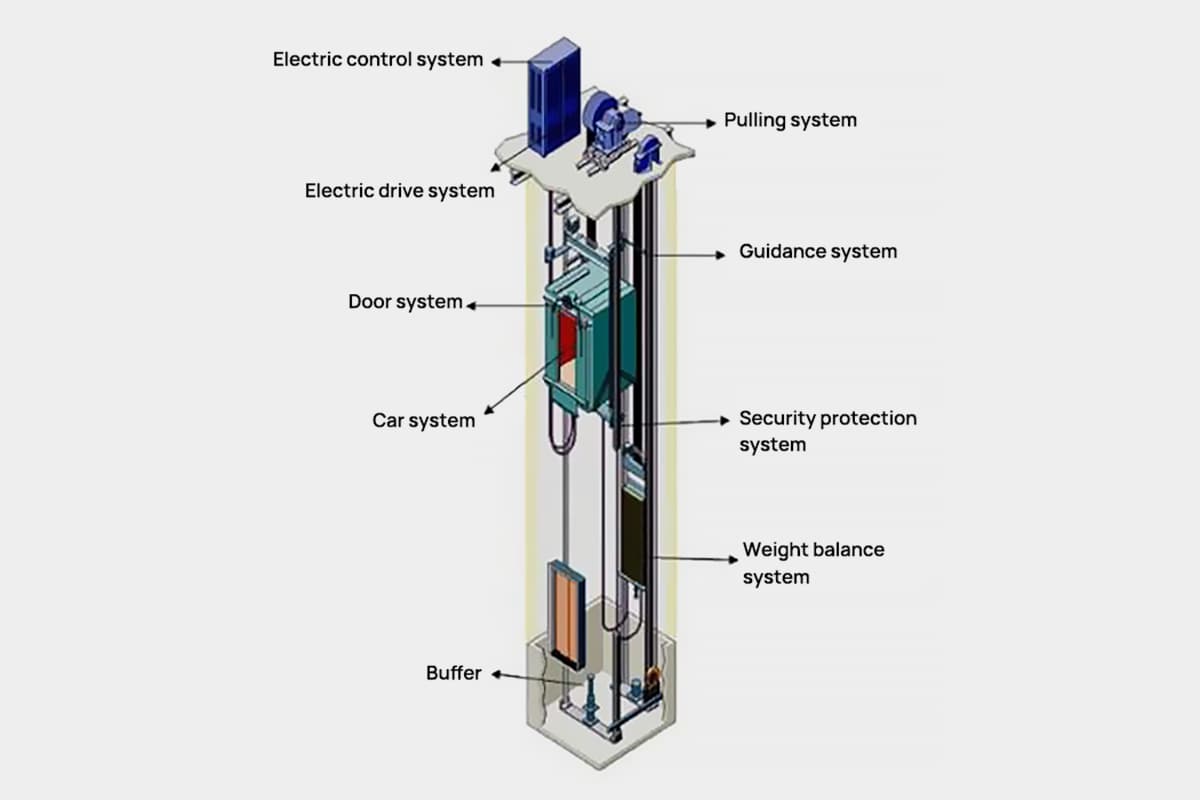
Haben Sie sich jemals gefragt, wie Sie in einem Aufzug sicher und reibungslos vorankommen? In diesem Artikel befassen wir uns mit der komplizierten Struktur und den Funktionsprinzipien von Aufzügen und erforschen ihre...
Warum sind Werkstoffe wie POM, PTFE und Nylon für nicht standardisierte Maschinen so wichtig? Dieser Artikel befasst sich mit acht häufig verwendeten nichtmetallischen Werkstoffen, die in verschiedenen mechanischen Anwendungen unverzichtbar sind. Vom Verschleiß...
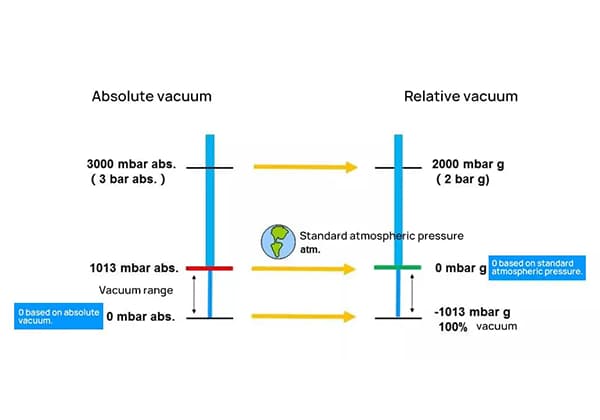
Sie suchen nach den besten Vakuumpumpenherstellern? Dieser Artikel hebt die führenden Marken der Branche für 2024 hervor, wie NASH, Edwards, Leybold und Atlas Copco. Jedes Unternehmen ist bekannt für...
Haben Sie sich schon einmal gefragt, warum sich Ihre Maschinenlager erhitzen und zu kostspieligen Ausfallzeiten führen? Hohe Lagertemperaturen können die Lebensdauer der Lager verkürzen und die Wartungskosten in die Höhe treiben. Dieser Artikel befasst sich mit den häufigsten Ursachen, wie...
Stellen Sie sich eine Welt vor, in der Maschinen nicht nur unsere Produkte herstellen, sondern auch denken und lernen wie wir. In diesem Artikel untersuchen wir, wie künstliche Intelligenz die Fertigungsindustrie verändert....