Haben Sie sich jemals gefragt, wie Maschinen präzise Bewegungen ausführen können? In diesem Blog tauchen wir in die faszinierende Welt der Servomotor-Steuerungsarten ein. Von der Impuls- bis zur Analogsteuerung erforschen wir, wie jede Methode funktioniert und wo sie am besten eingesetzt werden kann. Machen Sie sich bereit, die Geheimnisse hinter der Präzision und Effizienz moderner Maschinen zu lüften!
Servomotoren werden aufgrund ihrer Präzision und Zuverlässigkeit in vielen verschiedenen Anwendungen eingesetzt. Eine der gebräuchlichsten Methoden zur Steuerung von Servomotoren, insbesondere bei kleinen Einzelgeräten, ist die Impulssteuerung. Diese Methode ist einfach und leicht zu verstehen und daher eine beliebte Wahl für die Motorpositionierung.
Grundlegendes Steuerungskonzept
Der Impulssteuerungsmodus beruht auf zwei grundlegenden Prinzipien:
Gesamtimpulszahl: Bestimmt den Verfahrweg des Motors. Die Anzahl der Impulse, die an den Servomotor gesendet werden, entspricht direkt der Strecke, die der Motor zurücklegt. Wenn ein Servomotor beispielsweise 2000 Impulse benötigt, um eine volle Umdrehung zu vollenden, führt das Senden von 1000 Impulsen zu einer halben Umdrehung.
Pulsfrequenz: Damit wird die Geschwindigkeit des Motors bestimmt. Die Frequenz, mit der die Impulse an den Motor gesendet werden, bestimmt, wie schnell sich der Motor bewegen wird. Eine höhere Impulsfrequenz führt zu einer schnelleren Motorgeschwindigkeit, während eine niedrigere Frequenz zu einer langsameren Bewegung führt.
Implementierung der Impulssteuerung
Gehen Sie folgendermaßen vor, um eine Impulssteuerung für einen Servomotor zu implementieren:
Impulssteuerungsmodus auswählen: Vergewissern Sie sich, dass der Servomotor und sein Controller für den Betrieb im Impulssteuerungsmodus eingestellt sind. Dies kann in der Regel über die Konfigurationseinstellungen des Motors oder durch Auswahl des entsprechenden Modus in der Software des Controllers erfolgen.
Impulsanforderungen bestimmen: Schauen Sie im Handbuch des Servomotors nach, um das Verhältnis zwischen Impulsen und Motorbewegung zu verstehen. Das Handbuch enthält eine Tabelle oder Formel, die angibt, wie viele Impulse für bestimmte Bewegungen erforderlich sind.
Erzeugen von Impulsen: Verwenden Sie einen Impulsgenerator oder einen Mikrocontroller, um die erforderlichen Impulse zu erzeugen. Der Impulsgenerator sollte in der Lage sein, Impulse mit der gewünschten Frequenz und Anzahl zu erzeugen.
Senden von Impulsen an den Motor: Schließen Sie den Impulsgeber an den Eingang des Servomotors an. Der Motor wird die Impulse empfangen und sich entsprechend bewegen. Vergewissern Sie sich, dass die Anschlüsse sicher sind und dass der Impulsgeber richtig konfiguriert ist.
Beispieltabelle aus dem Servomotor-Handbuch
Hier ein Beispiel dafür, wie eine typische Tabelle aus einem Handbuch für Servomotoren aussehen könnte:
Befehlsimpulsform
Signalname
Positiver Richtungsbefehl
Negativer Richtungsbefehl
90 Bit Phasendifferenz
2-Phasen-Impuls A + B-Phase
PULS-ZEICHEN
B ist 90 Grad schneller als Phase a
B ist 90 Grad langsamer als Phase a
Positive Impulsfolge + negative Impulsfolge
PULS-ZEICHEN
Impuls + Symbol
PULS-ZEICHEN
Vorteile der Impulskontrolle
Vereinfachung: Die Impulssteuerung ist einfach zu implementieren und zu verstehen, so dass sie sich für verschiedene Anwendungen eignet.
Präzision: Durch die Steuerung der Anzahl und Frequenz der Impulse kann eine präzise Positionierung und Geschwindigkeitssteuerung erreicht werden.
Flexibilität: Die Impulssteuerung kann mit verschiedenen Arten von Servomotoren und Reglern verwendet werden und bietet somit Flexibilität bei der Systemgestaltung.
Implementierungsmethoden für impulsgesteuerte Motortreiber
Im Bereich der Motorsteuerung, insbesondere bei Hochgeschwindigkeitsanwendungen, sind Impulssteuerungsmethoden entscheidend für die Bestimmung der Drehrichtung und Geschwindigkeit des Motors. Im Folgenden werden drei verschiedene Methoden der Impulssteuerung untersucht, die jeweils ihre eigenen Merkmale, Vorteile und Einschränkungen haben.
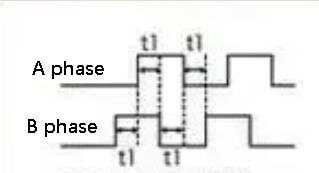
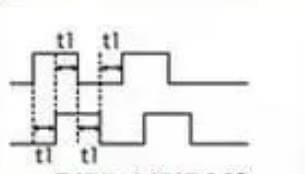
Methode 1: Differenzialsteuerung
Umsetzung:
Der Treiber empfängt zwei Hochgeschwindigkeitsimpulse, die als 𝑎 bezeichnet werden.a und 𝑏b.
Die Drehrichtung des Motors wird durch die Phasendifferenz zwischen diesen beiden Impulsen bestimmt.
Wenn Impuls 𝑏b führt Impuls 𝑎a um 90 Grad drehen, dreht sich der Motor in die positive Richtung.
Wenn Impuls 𝑏b verzögerter Impuls 𝑎a um 90 Grad drehen, dreht sich der Motor in umgekehrter Richtung.
Merkmale:
Abwechselnde Impulse: Die zweiphasigen Impulse wechseln sich ab, was zu dem Begriff "Differenzialsteuerung" führt.
Anti-Interferenz: Diese Methode weist eine höhere Störfestigkeit auf und ist daher für Umgebungen mit starken elektromagnetischen Störungen geeignet.
Beschränkungen:
Ressourcenintensiv: Erfordert zwei Hochgeschwindigkeitsimpulsanschlüsse für eine einzelne Motorwelle, was in Systemen mit begrenzter Verfügbarkeit von Hochgeschwindigkeitsimpulsanschlüssen eine Einschränkung darstellen kann.
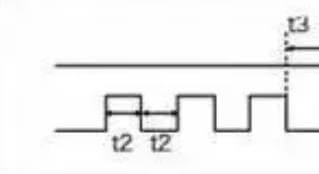
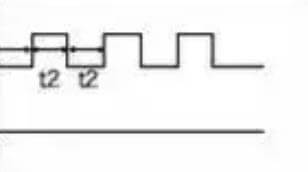
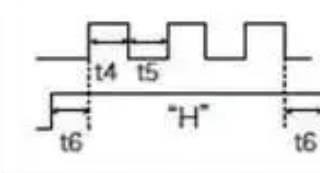
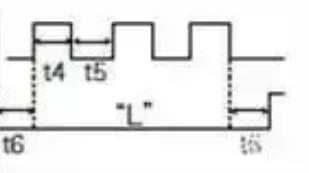
Methode 2: Sequentielle Impulssteuerung
Umsetzung:
Der Fahrer empfängt immer noch zwei Hochgeschwindigkeitsimpulse, aber sie liegen nicht gleichzeitig vor.
Wenn ein Impuls aktiv ist, muss der andere inaktiv sein.
Ein Impuls steuert die positive Richtung, der andere die negative Richtung.
Merkmale:
Sequentielle Impulse: Stellt sicher, dass zu jedem Zeitpunkt nur ein Impuls ausgegeben wird, um gleichzeitige Impulskonflikte zu vermeiden.
Beschränkungen:
Ressourcenintensiv: Ähnlich wie bei der Differenzialsteuerung werden auch bei dieser Methode zwei Hochgeschwindigkeits-Impulsanschlüsse für eine einzige Motorwelle benötigt.
Methode 3: Einzelimpuls mit gerichtetem IO-Signal
Umsetzung:
Der Treiber erhält ein einzelnes Hochgeschwindigkeits-Impulssignal.
Die Drehrichtung des Motors wird durch ein zusätzliches richtungsabhängiges IO-Signal gesteuert.
Merkmale:
Einfachere Kontrolle: Diese Methode vereinfacht die Steuerlogik, indem sie die Anzahl der erforderlichen Impulssignale reduziert.
Ressourcenschonend: Beansprucht weniger Hochgeschwindigkeits-Impulsanschlüsse und ist daher ideal für kleinere Systeme mit begrenzten Ressourcen.
Beschränkungen:
Geringere Anti-Interferenz: Diese Methode ist zwar einfacher, bietet aber möglicherweise nicht den gleichen Grad an Störsicherheit wie die Differenzialsteuerung.
Zusammenfassung
Jede Impulssteuerungsmethode bietet eindeutige Vorteile und ist für unterschiedliche Anwendungsszenarien geeignet:
Differentialsteuerung: Am besten geeignet für Umgebungen mit starken Störungen, da es überragende Anti-Interferenz-Fähigkeiten besitzt, aber mehr Ressourcen benötigt.
Sequentielle Impulssteuerung: Bietet ein ausgewogenes Verhältnis zwischen Steuerungskomplexität und Ressourcennutzung, erfordert aber immer noch zwei Hochgeschwindigkeits-Pulsanschlüsse.
Einzelimpuls mit gerichtetem IO-Signal: Ideal für kleine Systeme mit begrenzten Ressourcen, die Einfachheit und Effizienz auf Kosten potenziell geringerer Anti-Interferenz-Fähigkeiten bieten.
Bei der Auswahl einer Kontrollmethode sollten Sie die spezifischen Anforderungen Ihrer Anwendung berücksichtigen, einschließlich des Störungsgrads, der Verfügbarkeit von Ressourcen und der Komplexität der Kontrolle.
2. Servomotor Analoger Steuerungsmodus
Bei Anwendungen, die eine präzise Drehzahlregelung eines Servomotors erfordern, kann die analoge Steuerung eine effektive Methode sein. Dieser Modus nutzt ein analoges Signal, um die Motordrehzahl zu regeln, und bietet einen unkomplizierten und flexiblen Ansatz.
Auswahl der analogen Größe
Das analoge Steuersignal kann entweder eine Spannung oder ein Strom sein. Jede Methode hat ihre eigenen Vorteile und Überlegungen:
Spannung Modus
Im Spannungsmodus ist das Steuersignal eine bestimmte Spannung, die an den Steuereingang des Servomotors angelegt wird. Diese Methode ist relativ einfach zu implementieren und kann sogar mit einem Potentiometer für manuelle Einstellungen realisiert werden. Hier sind die wichtigsten Punkte:
Umsetzung: Legen Sie eine bestimmte Spannung an das Ende des Steuersignals an.
Benutzerfreundlichkeit: Einfache Einstellung, oft mit einem Potentiometer.
Angemessenheit: Ideal für einfache Anwendungen mit minimalen Umwelteinflüssen.
Spannungssignale sind jedoch anfällig für Rauschen und Störungen, insbesondere in komplexen Umgebungen. Dies kann zu einer instabilen Motorsteuerung führen und macht sie in solchen Szenarien weniger zuverlässig.
Aktueller Modus
Für die Steuerung im Strommodus ist ein entsprechendes Stromausgangsmodul zur Erzeugung des Steuersignals erforderlich. Trotz des zusätzlichen Hardwarebedarfs bieten Stromsignale erhebliche Vorteile in Bezug auf Stabilität und Zuverlässigkeit:
Umsetzung: Erfordert ein Stromausgangsmodul.
Anti-Interferenz: Hohe Widerstandsfähigkeit gegen Umgebungslärm und Störungen.
Angemessenheit: Optimal für komplexe Umgebungen, in denen eine stabile Steuerung entscheidend ist.
Die robuste Beschaffenheit von Stromsignalen macht sie zu einer bevorzugten Lösung in der Industrie oder bei anderen Anwendungen, bei denen Umweltbedingungen die Signalintegrität beeinträchtigen können.
3. Servomotor-Kommunikationssteuerungsmodus
Servomotoren sind wichtige Komponenten in verschiedenen industriellen Anwendungen, die eine präzise Steuerung der Bewegung ermöglichen. Der Kommunikationssteuerungsmodus für Servomotoren ist entscheidend für einen effizienten und genauen Betrieb, insbesondere in komplexen und großen Systemen. Im Folgenden werden die gängigen Kommunikationsprotokolle für die Steuerung von Servomotoren und ihre Vorteile vorgestellt.
Gemeinsame Kommunikationsprotokolle
CAN (Controller Area Network)
Übersicht: CAN ist ein robuster Fahrzeugbus-Standard, der es Mikrocontrollern und Geräten ermöglicht, ohne einen Host-Computer miteinander zu kommunizieren.
Vorteile: Hohe Zuverlässigkeit, Echtzeitfähigkeit und Fehlererkennungsmechanismen.
Anwendungen: Weit verbreitet in der Automobil- und Industrieautomation.
EtherCAT (Ethernet für Steuerungs-Automatisierungstechnik)
Übersicht: EtherCAT ist ein Ethernet-basiertes Feldbussystem, das für Echtzeit-Steuerungsanwendungen entwickelt wurde.
Vorteile: Hochgeschwindigkeitskommunikation, niedrige Latenzzeit und Synchronisierungsfunktionen.
Anwendungen: Ideal für Hochleistungsanwendungen wie Robotik, CNC-Maschinen und Bewegungssteuerungssysteme.
MODBUS
Übersicht: MODBUS ist ein serielles Kommunikationsprotokoll, das ursprünglich von Modicon zur Verwendung mit seinen speicherprogrammierbaren Steuerungen (SPS) veröffentlicht wurde.
Vorteile: Einfachheit, leichte Implementierung und breite Akzeptanz.
Anwendungen: Wird häufig in industriellen Umgebungen zum Anschluss von elektronischen Geräten verwendet.
PROFIBUS (Prozess-Feldbus)
Übersicht: PROFIBUS ist ein Standard für die Feldbuskommunikation in der Automatisierungstechnik.
Vorteile: Hohe Datenübertragungsgeschwindigkeit, Zuverlässigkeit und umfangreiche Diagnosemöglichkeiten.
Anwendungen: Einsatz in der Fabrik- und Prozessautomatisierung.
Vorteile der Kommunikationssteuerung bei Servomotoren
Die Verwendung von Kommunikationsprotokollen zur Steuerung von Servomotoren bietet mehrere Vorteile, insbesondere bei komplexen und umfangreichen Systemanwendungen:
Skalierbarkeit: Die Größe des Systems und die Anzahl der Motorwellen können leicht angepasst werden, ohne dass wesentliche Änderungen an der Infrastruktur vorgenommen werden müssen.
Reduzierte Verdrahtungskomplexität: Die Kommunikationssteuerung macht eine umfangreiche Steuerverdrahtung überflüssig und vereinfacht die Installation und Wartung.
Flexibilität: Das gebaute System ist sehr flexibel und ermöglicht eine einfache Integration und Neukonfiguration der Komponenten.
Verbesserte Diagnostik: Kommunikationsprotokolle enthalten häufig Diagnosefunktionen, die bei der Überwachung und Fehlersuche im System helfen.
Kontrolle in Echtzeit: Protokolle wie EtherCAT bieten Echtzeit-Steuerungsfunktionen, die für Anwendungen, die ein präzises Timing und eine präzise Synchronisation erfordern, unerlässlich sind.
4. Erweiterung der Steuerungsmodi für Servomotoren
1. Servomotor-Drehmomentregelung
Der Modus Drehmomentsteuerung ermöglicht die präzise Einstellung des externen Abtriebsdrehmoments der Motorwelle durch Eingabe eines externen Analogsignals oder durch direkte Adresszuweisung. Dieser Modus ist besonders nützlich bei Anwendungen, bei denen die Aufrechterhaltung einer konstanten Materialspannung entscheidend ist.Beispiel:
Wenn ein 10-V-Eingang einem Drehmoment von 5 Nm entspricht, dann führt ein 5-V-Eingang zu einem Drehmoment von 2,5 Nm.
Wenn die Belastung der Motorwelle weniger als 2,5 Nm beträgt, dreht sich der Motor vorwärts.
Wenn die externe Last 2,5 Nm beträgt, bleibt der Motor stehen.
Wenn die Last 2,5 Nm übersteigt, kehrt der Motor die Richtung um (üblich bei Systemen, die durch die Schwerkraft belastet werden).
Anwendungen:
Auf- und Abwickelvorrichtungen, wie z. B. in der Textilherstellung oder bei Geräten zum Ziehen von Glasfasern, bei denen die Materialspannung konstant bleiben muss.
Echtzeitanpassungen der Drehmomenteinstellung können durch Änderung des Analogeingangs oder durch Änderung des Werts über Kommunikationsprotokolle vorgenommen werden, wodurch eine gleichbleibende Materialbelastung trotz Änderungen des Wickelradius gewährleistet wird.
2. Servomotor-Positionskontrolle
Im Lageregelungsmodus wird die Drehzahl des Motors in der Regel durch die Frequenz der externen Eingangsimpulse bestimmt, während der Drehwinkel durch die Anzahl der Impulse gesteuert wird.Merkmale:
Einige Servosysteme ermöglichen die direkte Zuordnung von Geschwindigkeits- und Wegwerten über die Kommunikation.
Dieser Modus bietet eine präzise Steuerung von Geschwindigkeit und Position und ist daher ideal für Anwendungen, die eine hohe Genauigkeit erfordern.
Anwendungen:
Positionierungsgeräte
CNC-Werkzeugmaschinen
Druckmaschinen
3. Servomotor-Drehzahlmodus
Der Drehzahlmodus ermöglicht die Steuerung der Motordrehzahl über einen Analogeingang oder eine Impulsfrequenz.Merkmale:
Bei der PID-Regelung im äußeren Regelkreis durch ein übergeordnetes Steuergerät kann der Geschwindigkeitsmodus auch zur Positionierung verwendet werden.
Das Positionssignal vom Motor oder der direkten Last muss zur Verarbeitung an den oberen Rechner zurückgeführt werden.
Unterstützt die direkte Erfassung der Außenringposition der Last, wobei der Motorwellengeber nur die Geschwindigkeit misst und ein separates Gerät am Lastende das Positionssignal liefert.
Vorteile:
Reduziert Fehler bei der Zwischenübertragung
Verbessert die Positionierungsgenauigkeit des gesamten Systems
4. Die drei Schleifen verstehen
Servosysteme arbeiten in der Regel mit drei PID-Regelsystemen mit negativer Rückkopplung: dem Stromregelkreis, dem Drehzahlregelkreis und dem Positionsregelkreis.Aktuelle Schleife:
Die innerste Schleife, die vollständig im Servotreiber verarbeitet wird.
Erfasst und regelt den Ausgangsstrom jeder Motorphase mit Hilfe eines Hallgeräts.
Steuert das Motordrehmoment mit minimaler Rechenlast und schneller Dynamik.
Geschwindigkeitsschleife:
Die zweite Schleife, die die Rückmeldung des Motorgebers nutzt.
Der PID-Ausgang des Drehzahlregelkreises legt den Stromregelkreis fest, d. h. die Drehzahlregelung schließt die Stromregelung von vornherein ein.
Unverzichtbar für jede Regelungsart, da die Stromschleife die Grundlage der Regelung bildet.
Position Schleife:
Die äußerste Schleife, die zwischen dem Treiber und dem Motorgeber oder zwischen einem externen Controller und dem Motorgeber/der Endlast konfiguriert werden kann.
Der interne Ausgang des Lageregelkreises gibt den Drehzahlregelkreis vor, was den Betrieb aller drei Regelkreise im Lageregelungsmodus erforderlich macht.
Dieser Modus ist am rechenintensivsten und hat die geringste Dynamik.
Schlussfolgerung
Das Verständnis der verschiedenen Regelungsarten und des Dreikreissystems von Servomotoren ist für die Optimierung ihrer Leistung in verschiedenen industriellen Anwendungen unerlässlich. Jeder Modus bietet einzigartige Vorteile und ist für bestimmte Aufgaben geeignet, um eine präzise Steuerung von Drehmoment, Position und Geschwindigkeit zu gewährleisten.
Als Gründer von MachineMFG habe ich mehr als ein Jahrzehnt meiner Karriere der metallverarbeitenden Industrie gewidmet. Meine umfangreiche Erfahrung hat es mir ermöglicht, ein Experte auf den Gebieten der Blechverarbeitung, der maschinellen Bearbeitung, des Maschinenbaus und der Werkzeugmaschinen für Metalle zu werden. Ich denke, lese und schreibe ständig über diese Themen und bin stets bestrebt, in meinem Bereich an vorderster Front zu bleiben. Lassen Sie mein Wissen und meine Erfahrung zu einem Gewinn für Ihr Unternehmen werden.
Servosysteme sind ein integraler Bestandteil elektromechanischer Produkte und bieten ein Höchstmaß an Dynamik und Drehmomentdichte. Daher geht der Trend bei der Entwicklung von Antriebssystemen dahin, die traditionellen...
Die Wahl des richtigen Servomotors für Ihr Projekt kann angesichts der vielen verfügbaren Optionen eine entmutigende Aufgabe sein. Dieser Artikel vereinfacht den Prozess, indem er die wichtigsten Überlegungen aufschlüsselt: Anwendung...
Mit der Verbesserung des Preis-Leistungs-Verhältnisses von bildgebenden Geräten und der Geschwindigkeit der Computer-Informationsverarbeitung sowie der Vervollkommnung der zugehörigen Theorien hat die Vision-Servo-Technologie die technischen Voraussetzungen...
Wie erreichen moderne Maschinen eine präzise Steuerung bei komplexen Aufgaben? Servosysteme sind die Antwort. Dieser Artikel befasst sich mit den Grundsätzen von Servosystemen und untersucht, wie sie funktionieren und...
Haben Sie sich jemals gefragt, wie Maschinen den perfekten Motor auswählen? Dieser Artikel enthüllt den faszinierenden Prozess der Auswahl des richtigen Servomotors für verschiedene mechanische Aufgaben. Tauchen Sie ein, um die Berechnungen zu verstehen...
Wollten Sie schon immer wissen, wie man einen Servotreiber für Spitzenleistungen einstellt? Dieser Leitfaden enthält alles, was Sie über die Einstellung von Verstärkungsparametern wissen müssen, von der Positionssteuerung bis zur Geschwindigkeitsregelung....
Worin unterscheiden sich Servo- und Schrittmotoren, die in modernen Maschinen von zentraler Bedeutung sind? Dieser Artikel befasst sich mit ihren grundlegenden Unterschieden, Vorteilen und spezifischen Anwendungen. Beim Lesen erhalten Sie Einblicke in ihre...
Haben Sie sich jemals gefragt, warum Ihr Servomotor plötzlich ruckelt und den reibungslosen Betrieb Ihrer Maschine stört? Dieser Artikel deckt die häufigsten Ursachen für Servomotor-Ruckeln auf und bietet praktische Lösungen für...
In der schnelllebigen Welt der industriellen Automatisierung sind Servomotoren die unbesungenen Helden, die für Präzision und Effizienz sorgen. Aber woher weiß man bei den zahllosen Herstellern, die um Aufmerksamkeit buhlen, welche...