Вы когда-нибудь задумывались, как машины добиваются точных движений? В этом блоге мы погрузимся в увлекательный мир режимов управления серводвигателями. От импульсного до аналогового управления - мы рассмотрим, как работает каждый метод и где его лучше всего применять. Приготовьтесь раскрыть секреты, лежащие в основе точности и эффективности современного оборудования!
Серводвигатели широко используются в различных приложениях благодаря своей точности и надежности. Одним из наиболее распространенных методов управления серводвигателями, особенно в небольшом автономном оборудовании, является импульсное управление. Этот метод прост и понятен, что делает его популярным для позиционирования двигателей.
Основная концепция управления
Режим импульсного управления работает на двух фундаментальных принципах:
Общее количество импульсов: Определяет перемещение двигателя. Количество импульсов, посылаемых на сервомотор, напрямую соответствует расстоянию, на которое переместится мотор. Например, если серводвигателю требуется 2000 импульсов для совершения одного полного оборота, отправка 1000 импульсов приведет к половине оборота.
Частота импульсов: Определяет скорость вращения двигателя. Частота импульсов, посылаемых на двигатель, определяет, насколько быстро он будет двигаться. Более высокая частота импульсов приводит к увеличению скорости двигателя, а более низкая - к замедлению движения.
Реализация импульсного управления
Чтобы реализовать импульсное управление серводвигателем, выполните следующие действия:
Выбор режима управления импульсами: Убедитесь, что серводвигатель и его контроллер настроены на работу в режиме импульсного управления. Обычно это можно сделать через настройки конфигурации двигателя или выбрав соответствующий режим в программном обеспечении контроллера.
Определите потребности в импульсах: Обратитесь к руководству по эксплуатации серводвигателя, чтобы понять взаимосвязь между импульсами и движением двигателя. В руководстве будет приведена таблица или формула, указывающая, сколько импульсов требуется для определенных движений.
Генерировать импульсы: Используйте генератор импульсов или микроконтроллер для генерации необходимых импульсов. Генератор импульсов должен быть способен генерировать импульсы с требуемой частотой и количеством.
Подача импульсов на двигатель: Подключите генератор импульсов к входу сервомотора. Двигатель будет получать импульсы и двигаться соответствующим образом. Убедитесь, что соединения надежны и что генератор импульсов настроен правильно.
Пример таблицы из руководства по серводвигателю
Вот пример типичной таблицы из руководства по эксплуатации серводвигателя:
Простота: Импульсное управление легко реализовать и понять, что делает его подходящим для различных применений.
Точность: Контролируя количество и частоту импульсов, можно добиться точного позиционирования и регулирования скорости.
Гибкость: Импульсное управление может использоваться с различными типами серводвигателей и контроллеров, обеспечивая гибкость при проектировании системы.
Методы реализации драйверов двигателей с импульсным управлением
В сфере управления двигателями, особенно в высокоскоростных приложениях, методы импульсного управления имеют решающее значение для определения направления вращения и скорости двигателя. Ниже мы рассмотрим три различных метода импульсного управления, каждый из которых имеет свои уникальные характеристики, преимущества и ограничения.
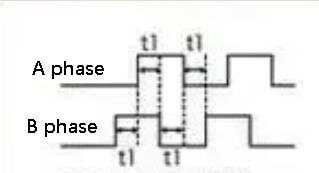
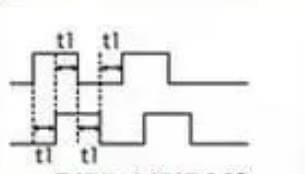
Метод 1: Дифференциальное управление
Реализация:
Драйвер получает два высокоскоростных импульса, обозначенных как 𝑎a и 𝑏b.
Направление вращения двигателя определяется разностью фаз между этими двумя импульсами.
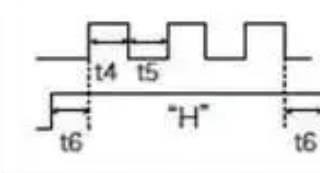
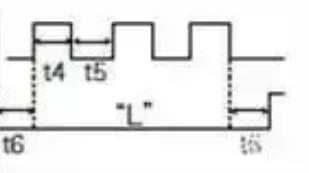
Если импульс 𝑏b ведет импульс 𝑎a на 90 градусов, двигатель вращается в положительном направлении.
Если импульс 𝑏b запаздывающий импульс 𝑎a на 90 градусов, двигатель вращается в обратном направлении.
Характеристики:
Чередующиеся импульсы: Двухфазные импульсы чередуются, что и привело к термину "дифференциальное управление".
Защита от вмешательства: Этот метод отличается повышенной помехозащищенностью, что делает его пригодным для использования в условиях сильных электромагнитных помех.
Ограничения:
Ресурсоемкий: Требуется два высокоскоростных импульсных порта для одного вала двигателя, что может быть ограничением в системах с ограниченной доступностью высокоскоростных импульсных портов.
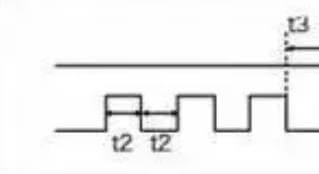
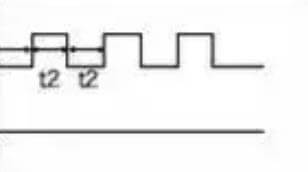
Метод 2: Последовательное управление импульсами
Реализация:
Драйвер по-прежнему получает два высокоскоростных импульса, но они не существуют одновременно.
Когда один импульс активен, другой должен быть неактивен.
Один импульс управляет положительным направлением, а другой - отрицательным.
Характеристики:
Последовательные импульсы: Обеспечивает выдачу только одного импульса в любой момент времени, предотвращая одновременный конфликт импульсов.
Ограничения:
Ресурсоемкий: Подобно дифференциальному управлению, этот метод также требует двух высокоскоростных импульсных портов для одного вала двигателя.
Метод 3: Одиночный импульс с направленным сигналом ввода-вывода
Реализация:
На драйвер поступает один высокоскоростной импульсный сигнал.
Направление вращения двигателя контролируется дополнительным сигналом IO.
Характеристики:
Более простое управление: Этот метод упрощает логику управления за счет уменьшения количества необходимых импульсных сигналов.
Экономия ресурсов: Занимает меньше высокоскоростных импульсных портов, что делает его идеальным для небольших систем с ограниченными ресурсами.
Ограничения:
Нижний уровень защиты от помех: Несмотря на свою простоту, этот метод не может обеспечить такой же уровень защиты от помех, как дифференциальное управление.
Резюме
Каждый метод импульсного управления имеет свои преимущества и подходит для различных сценариев применения:
Дифференциальное управление: Лучше всего подходит для работы в условиях сильных помех благодаря своим превосходным антиинтерференционным возможностям, но требует больше ресурсов.
Последовательное управление импульсами: Обеспечивает баланс между сложностью управления и использованием ресурсов, но по-прежнему требует двух высокоскоростных импульсных портов.
Одиночный импульс с направленным сигналом ввода-вывода: Идеально подходит для небольших систем с ограниченными ресурсами, предлагая простоту и эффективность за счет потенциально более низких возможностей защиты от помех.
При выборе метода управления учитывайте специфические требования вашего приложения, включая уровень помех, доступность ресурсов и сложность управления.
2. Режим аналогового управления серводвигателем
В тех случаях, когда требуется точное управление скоростью серводвигателя, эффективным методом может быть аналоговое управление. Этот режим использует аналоговый сигнал для регулирования скорости двигателя, предлагая простой и гибкий подход.
Выбор аналогового количества
Аналоговый управляющий сигнал может быть как напряжением, так и током. Каждый метод имеет свои преимущества и особенности:
Режим напряжения
В режиме напряжения управляющий сигнал представляет собой определенное напряжение, подаваемое на управляющий вход серводвигателя. Этот метод относительно прост в реализации и может быть реализован даже с помощью потенциометра для ручной регулировки. Вот основные моменты:
Реализация: Подайте определенное напряжение на конец управляющего сигнала.
Простота использования: Простая настройка, часто с помощью потенциометра.
Пригодность: Идеально подходит для прямолинейных применений с минимальным воздействием окружающей среды.
Однако сигналы напряжения подвержены шуму и помехам, особенно в сложных условиях. Это может привести к нестабильному управлению двигателем, что делает его менее надежным в таких сценариях.
Текущий режим
Управление в токовом режиме требует наличия соответствующего модуля токового выхода для формирования управляющего сигнала. Несмотря на дополнительные аппаратные требования, токовые сигналы имеют значительные преимущества с точки зрения стабильности и надежности:
Реализация: Требуется модуль токового выхода.
Защита от помех: Сильная устойчивость к шумам и помехам окружающей среды.
Пригодность: Оптимально подходит для сложных сред, где стабильное управление имеет решающее значение.
Надежность токовых сигналов делает их предпочтительными в промышленных установках и других приложениях, где условия окружающей среды могут повлиять на целостность сигнала.
3. Режим управления связью с серводвигателем
Серводвигатели являются важнейшими компонентами в различных промышленных приложениях, обеспечивая точное управление движением. Режим управления серводвигателями по связи очень важен для достижения эффективной и точной работы, особенно в сложных и масштабных системах. Здесь мы рассмотрим распространенные протоколы связи, используемые для управления серводвигателями, и их преимущества.
Общие протоколы связи
CAN (сеть контроллеров)
Обзор: CAN - это надежный стандарт автомобильной шины, разработанный для того, чтобы микроконтроллеры и устройства могли взаимодействовать друг с другом без главного компьютера.
Преимущества: Высокая надежность, возможность работы в режиме реального времени и механизмы обнаружения ошибок.
Приложения: Широко используется в автомобильных и промышленных системах автоматизации.
EtherCAT (Ethernet для технологии автоматизации управления)
Обзор: EtherCAT - это полевая шина на базе Ethernet, предназначенная для приложений управления в реальном времени.
Преимущества: Высокоскоростная связь, низкая задержка и возможности синхронизации.
Приложения: Идеально подходит для высокопроизводительных приложений, таких как робототехника, станки с ЧПУ и системы управления движением.
MODBUS
Обзор: MODBUS - это протокол последовательной передачи данных, первоначально опубликованный компанией Modicon для использования в программируемых логических контроллерах (ПЛК).
Преимущества: Простота, легкость реализации и широкое внедрение.
Приложения: Обычно используется в промышленных условиях для подключения электронных устройств.
PROFIBUS (технологическая полевая шина)
Обзор: PROFIBUS - это стандарт для связи по полевой шине в технологии автоматизации.
Преимущества: Высокая скорость передачи данных, надежность и широкие диагностические возможности.
Приложения: Используется для автоматизации производства и автоматизации процессов.
Преимущества коммуникационного управления в серводвигателях
Использование коммуникационных протоколов для управления серводвигателями дает ряд преимуществ, особенно в сложных и масштабных системных приложениях:
Масштабируемость: Размер системы и количество валов двигателя можно легко изменить без существенных изменений в инфраструктуре.
Снижение сложности проводки: Коммуникационное управление снижает необходимость в обширной проводке управления, упрощая установку и обслуживание.
Гибкость: Созданная система отличается высокой гибкостью, что позволяет легко интегрировать и изменять конфигурацию компонентов.
Расширенная диагностика: Протоколы связи часто включают в себя диагностические функции, которые помогают контролировать и устранять неполадки в системе.
Контроль в режиме реального времени: Такие протоколы, как EtherCAT, предоставляют возможности управления в реальном времени, что очень важно для приложений, требующих точной синхронизации.
4. Расширение режимов управления серводвигателем
1. Управление крутящим моментом серводвигателя
Режим управления крутящим моментом позволяет точно установить внешний крутящий момент на валу двигателя с помощью внешнего аналогового сигнала или прямого задания адреса. Этот режим особенно полезен в тех областях применения, где очень важно поддерживать постоянное напряжение материала.Пример:
Если входное напряжение 10 В соответствует 5 Нм крутящего момента, то входное напряжение 5 В приведет к 2,5 Нм крутящего момента на выходе.
Когда нагрузка на вал двигателя не превышает 2,5 Нм, двигатель вращается вперед.
Когда внешняя нагрузка равна 2,5 Нм, двигатель остается неподвижным.
Когда нагрузка превышает 2,5 Нм, двигатель меняет направление (обычно в системах с гравитационной нагрузкой).
Приложения:
Устройства для намотки и размотки, например, используемые в текстильном производстве или в оборудовании для протяжки оптического волокна, где напряжение материала должно оставаться постоянным.
Регулировка крутящего момента в режиме реального времени может осуществляться путем изменения аналогового входа или изменения значения через коммуникационные протоколы, что обеспечивает постоянную нагрузку на материал, несмотря на изменение радиуса намотки.
2. Управление положением серводвигателя
В режиме управления положением скорость вращения двигателя обычно определяется частотой внешних входных импульсов, а угол поворота - количеством импульсов.Особенности:
Некоторые сервосистемы позволяют напрямую задавать значения скорости и перемещения через коммуникацию.
Этот режим обеспечивает точный контроль над скоростью и положением, что делает его идеальным для приложений, требующих высокой точности.
Приложения:
Устройства для позиционирования
Станки с ЧПУ
Полиграфическое оборудование
3. Режим скорости серводвигателя
Режим скорости позволяет управлять скоростью вращения двигателя через аналоговый вход или частоту импульсов.Особенности:
При использовании ПИД-регулирования по внешнему контуру от верхнего устройства управления режим скорости также может использоваться для позиционирования.
Сигнал положения от двигателя или прямой нагрузки должен поступать на верхний компьютер для обработки.
Поддерживает прямое определение положения наружного кольца нагрузки, когда энкодер вала двигателя измеряет только скорость, а отдельное устройство на конце нагрузки выдает сигнал положения.
Преимущества:
Сокращение ошибок при промежуточной передаче
Повышает общую точность позиционирования системы
4. Понимание трех петель
Сервосистемы обычно работают с использованием трех замкнутых систем ПИД-регулирования с отрицательной обратной связью: контур тока, контур скорости и контур положения.Текущая петля:
Самый внутренний цикл, полностью управляемый сервоприводом.
Определяет и регулирует выходной ток каждой фазы двигателя с помощью устройства Холла.
Управление моментом двигателя с минимальной вычислительной нагрузкой и быстрым динамическим откликом.
Скоростная петля:
Второй контур, использующий обратную связь от энкодера двигателя.
Выход ПИД-контура скорости задает контур тока, то есть управление скоростью по своей сути включает в себя управление током.
Необходим для любого режима управления, так как контур тока составляет основу управления.
Позиция Петля:
Крайний контур, который может быть сконфигурирован между драйвером и датчиком двигателя или между внешним контроллером и датчиком двигателя/конечной нагрузкой.
Внутренний выход контура регулирования положения задает контур скорости, что требует работы всех трех контуров в режиме регулирования положения.
Этот режим требует наибольших вычислительных усилий и имеет самый медленный динамический отклик.
Заключение
Понимание различных режимов управления и трехконтурной системы серводвигателей необходимо для оптимизации их работы в различных промышленных приложениях. Каждый режим обладает уникальными преимуществами и подходит для решения конкретных задач, обеспечивая точный контроль над моментом, положением и скоростью.
Не забывайте, что делиться - значит заботиться! : )
Поделиться
Facebook
Twitter
LinkedIn
Reddit
VK
Электронная почта
Печать
Автор
Шейн
Основатель MachineMFG
Как основатель MachineMFG, я посвятил более десяти лет своей карьеры металлообрабатывающей промышленности. Мой обширный опыт позволил мне стать экспертом в области производства листового металла, механической обработки, машиностроения и станков для обработки металлов. Я постоянно думаю, читаю и пишу об этих предметах, постоянно стремясь оставаться на переднем крае своей области. Позвольте моим знаниям и опыту стать преимуществом для вашего бизнеса.
Сервосистемы являются неотъемлемой частью электромеханических изделий, обеспечивая высочайший уровень динамического отклика и плотности крутящего момента. Поэтому тенденция развития приводных систем заключается в замене традиционных...
В стремительно развивающемся мире промышленной автоматизации серводвигатели - это невоспетые герои, обеспечивающие точность и эффективность. Но в условиях, когда бесчисленные производители борются за внимание, как узнать, кто из них...
Вы когда-нибудь задавались вопросом, как настроить сервопривод для достижения максимальной производительности? Это руководство охватывает все, что вам нужно знать о настройке параметров усиления, от управления положением до регулирования скорости.....
Выбор подходящего серводвигателя для вашего проекта может оказаться непростой задачей при наличии большого количества вариантов. Эта статья упрощает процесс, разбивая его на ключевые моменты: применение...
С улучшением соотношения цены и качества оборудования для получения изображений и скорости компьютерной обработки информации, а также с совершенствованием соответствующих теорий, сервотехника технического зрения достигла технических условий...
Как современные машины добиваются точного управления при выполнении сложных задач? Ответ на этот вопрос дают сервосистемы. В этой статье мы рассмотрим принципы работы сервосистем, выясним, как они функционируют и...
Вы когда-нибудь задумывались о том, как машины выбирают идеальный двигатель? В этой статье рассказывается об увлекательном процессе выбора подходящего серводвигателя для различных механических задач. Окунитесь в этот процесс, чтобы понять расчеты...
Что отличает серводвигатели от шаговых двигателей, но при этом играет ключевую роль в современном оборудовании? В этой статье рассматриваются их фундаментальные различия, преимущества и особенности применения. Прочитав статью, вы получите представление об их...
Вы когда-нибудь задумывались, почему ваш серводвигатель внезапно начинает дрожать, нарушая плавную работу машины? В этой статье раскрываются распространенные причины дрожания серводвигателя и предлагаются практические решения для...