1. Modo de control de impulsos del servomotor
En algunos equipos autónomos pequeños, seleccionar el control por pulsos para realizar el posicionamiento del motor debería ser el modo de aplicación más común.
Este modo de control es sencillo y fácil de entender.
Idea básica de control: la cantidad total de impulsos determina el desplazamiento del motor, y la frecuencia de impulsos determina la velocidad del motor.
Se selecciona el pulso para realizar el control del servomotor.
Abra el manual del servomotor y encontrará la siguiente tabla:
| Forma de impulso de mando | Nombre de la señal | Orden de dirección positiva | Comando de dirección negativa |
| Diferencia de fase de 90 bits
Impulso bifásico Fase A + B | SEÑAL PULS |
 B es 90 grados más rápida que la fase a |
 B es 90 grados más lenta que la fase a |
| Tren de impulsos positivo + tren de impulsos negativo | SEÑAL PULS |
 |
 |
| Pulso + símbolo | SEÑAL PULS |
 |
 |
Ambos están controlados por impulsos, pero el método de aplicación es diferente:
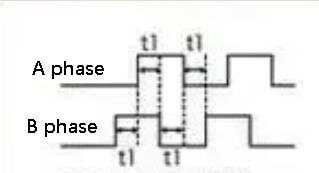
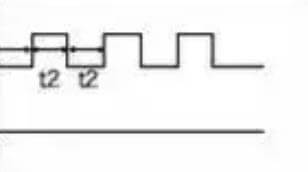
En primer lugar, el excitador recibe dos impulsos (a, b) de alta velocidad, y determina el sentido de rotación del motor a través de la diferencia de fase de los dos impulsos.
Como se muestra en la figura anterior, si B es 90 grados más rápida que la fase a, es una rotación positiva; si B es 90 grados más lenta que la fase a, es inversa.
Durante el funcionamiento, los impulsos bifásicos de este control se alternan, por lo que también llamamos a este método de control control diferencial.
Tiene características diferenciales, lo que también demuestra que este modo de control tiene una mayor capacidad antiinterferente.
En algunos escenarios de aplicación con fuertes interferencias, se prefiere este modo.
Sin embargo, de esta forma, un eje de motor necesita ocupar dos puertos de impulsos de alta velocidad, lo que no es aplicable a la tensión del puerto de impulsos de alta velocidad.
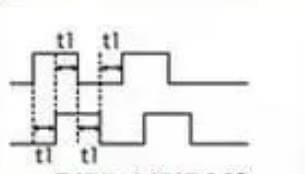
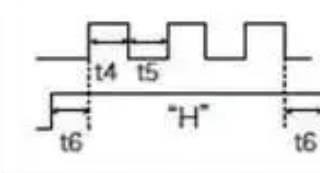
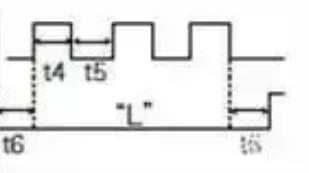
En segundo lugar, el conductor sigue recibiendo dos impulsos de alta velocidad, pero los dos impulsos de alta velocidad no existen al mismo tiempo.
Cuando un impulso está en estado de salida, el otro debe estar en estado no válido.
Al seleccionar este modo de control, debemos asegurarnos de que sólo haya una salida de impulsos al mismo tiempo.
Dos impulsos, uno de salida en sentido positivo y el otro en sentido negativo.
Como en el caso anterior, este modo también es un eje de motor, que necesita ocupar dos puertos de impulsos de alta velocidad.
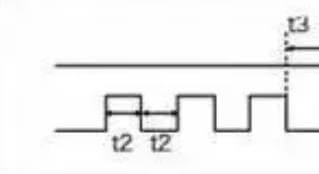
En tercer lugar, sólo es necesario dar una señal de impulso al excitador, y el funcionamiento hacia delante y hacia atrás del motor viene determinado por una señal IO unidireccional.
Este método de control es más sencillo de controlar, y la ocupación de recursos del puerto de impulsos de alta velocidad es la menor.
En general, en los sistemas pequeños puede preferirse este método.
2. Modo de control analógico del servomotor
En el escenario de aplicación donde el servomotor necesita ser utilizado para realizar el control de velocidad, podemos seleccionar la cantidad analógica para controlar la velocidad del motor.
El valor de la magnitud analógica determina la velocidad de marcha del motor.
La cantidad analógica puede seleccionarse de dos formas: corriente o tensión.
Modo de tensión:
Sólo tienes que añadir un cierto voltaje al extremo de la señal de control.
En algunos casos, puedes incluso utilizar un potenciómetro para realizar el control, lo que es muy sencillo.
Sin embargo, cuando se selecciona la tensión como señal de control, en la escena con un entorno complejo, la tensión es fácil que se perturbe, lo que da lugar a un control inestable.
Modo actual:
Se requiere un módulo de salida de corriente correspondiente, pero la señal de corriente tiene una gran capacidad antiinterferente y puede utilizarse en escenas complejas.
3. Modo de control de la comunicación del servomotor
Las formas habituales de realizar el control de servomotores mediante comunicación incluyen can, EtherCAT, MODBUS y PROFIBUS.
Utilizar la comunicación para controlar el motor es el método de control preferido en algunos escenarios de aplicación de sistemas complejos y a gran escala.
De este modo, el tamaño del sistema y el número de ejes del motor son fáciles de recortar, y no hay cableado de control complejo. El sistema construido tiene una gran flexibilidad.
4. Expansión
1. Control del par del servomotor
El modo de control de par consiste en ajustar el par de salida externo del eje del motor mediante la entrada de magnitud analógica externa o la asignación directa de direcciones.
Por ejemplo, si 10V corresponden a 5nm, cuando la cantidad analógica externa se ajusta a 5V, la salida del eje del motor es de 2,5nm.
Si la carga del eje del motor es inferior a 2,5 nm, el motor gira hacia delante, el motor no gira cuando la carga externa es igual a 2,5 nm, y el motor invierte cuando es superior a 2,5 nm (normalmente bajo carga de gravedad).
El par ajustado puede modificarse cambiando el ajuste de la cantidad analógica en tiempo real, o cambiando el valor de la dirección correspondiente a través de la comunicación.
Se utiliza principalmente en dispositivos de bobinado y desbobinado que tienen requisitos estrictos sobre la tensión de los materiales, como los dispositivos de bobinado o los equipos de tracción de fibra óptica.
El ajuste del par se modificará en cualquier momento en función del cambio del radio de enrollado, para garantizar que la tensión de los materiales no cambie con el cambio del radio de enrollado.
2. Control de posición del servomotor
En el modo de control de posición, la velocidad de rotación se determina generalmente por la frecuencia de los impulsos de entrada externos, y el ángulo de rotación se determina por el número de impulsos.
Algunos servos pueden asignar valores a la velocidad y al desplazamiento directamente a través de la comunicación.
Dado que el modo de posición puede controlar estrictamente la velocidad y la posición, se utiliza generalmente en dispositivos de posicionamiento, Máquina CNC herramientas, maquinaria de impresión, etc.
3. Modo de velocidad del servomotor
La velocidad de rotación puede controlarse mediante la entrada de magnitud analógica o frecuencia de impulsos.
Cuando existe el control PID de lazo exterior del dispositivo de control superior, también puede posicionarse el modo de velocidad, pero la señal de posición del motor o la señal de posición de la carga directa debe retroalimentarse al ordenador superior para su funcionamiento.
El modo de posición también admite el anillo exterior de carga directa para detectar la señal de posición.
En este momento, el codificador en el extremo del eje del motor sólo detecta la velocidad del motor, y la señal de posición es proporcionada por el dispositivo de detección directa en el extremo de carga final.
Esto tiene la ventaja de que puede reducir el error en el proceso de transmisión intermedia y aumentar la precisión de posicionamiento de todo el sistema.
4. Sobre los terceros bucles
Los servomotores suelen controlarse mediante tres bucles. Los denominados tres bucles son tres sistemas de regulación PID de retroalimentación negativa en bucle cerrado.
El bucle PID más interno es el bucle de corrienteque se realiza íntegramente en el interior del servocontrolador.
La corriente de salida de cada fase del excitador al motor se detecta a través del dispositivo hall, y la realimentación negativa se ajusta a la corriente para el ajuste PID, de modo que la corriente de salida sea lo más cercana posible a la corriente ajustada.
El bucle de corriente controla el par del motor, por lo que el cálculo del controlador es el más pequeño en el modo de par, y tiene la respuesta dinámica más rápida.
El segundo bucle es el de velocidad.
El ajuste PID de realimentación negativa se realiza a través de la señal detectada del codificador del motor.
Su salida PID en el bucle es directamente el ajuste del bucle de corriente. Por lo tanto, el control del bucle de velocidad incluye el bucle de velocidad y el bucle de corriente.
En otras palabras, el bucle de corriente debe utilizarse para cualquier modo, y el bucle de corriente es la base del control.
Al mismo tiempo que controla la velocidad y la posición, el sistema controla la corriente (par) para lograr el control correspondiente de la velocidad y la posición.
El tercer bucle es el de posición, que es el más externo.
Puede construirse entre el controlador y el codificador del motor, o entre el controlador externo y el codificador del motor o la carga final, dependiendo de la situación real.
Dado que la salida interna del lazo de control de posición es el ajuste del lazo de velocidad, el sistema realiza el funcionamiento de los tres lazos en el modo de control de posición.
En este momento, el sistema tiene la mayor cantidad de operaciones y la velocidad de respuesta dinámica más lenta.