Los codificadores son un tipo de sensor utilizado principalmente para detectar la velocidad, la posición, el ángulo, la distancia o el recuento de un movimiento mecánico.
Además de utilizarse en maquinaria, muchos controles de motores, como los servomotores, necesitan encóderes que proporcionen al controlador del motor información para la conmutación, la velocidad y la detección de posición.
2. Clasificación de los codificadores
El encóder puede dividirse en encóder analógico y encóder digital. El encóder analógico puede dividirse a su vez en transformador rotativo y encóder Sin/Cos, mientras que el encóder digital puede dividirse en encóder incremental y encóder absoluto.
3. Principios de funcionamiento de los codificadores más utilizados
3.1 Principio de los codificadores digitales
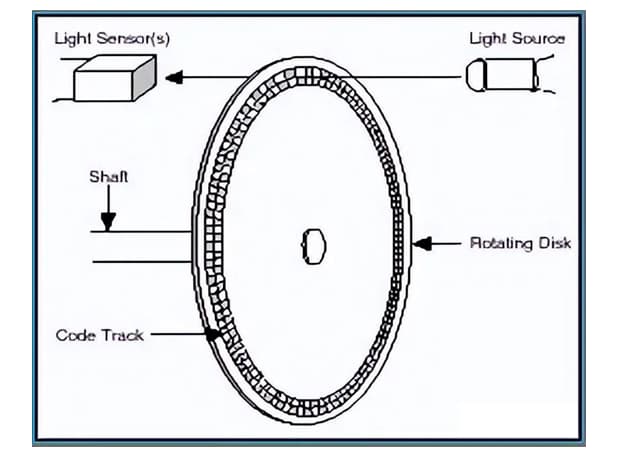
1)Utilizar acopladores fotoeléctricos para explorar un disco segmentado instalado en un eje mecánico.
El código mecánico se convierte en señales de impulsos eléctricos proporcionales.
La fuente de luz (generalmente un LED) emite un haz de luz estrecho hacia el receptor (que puede ser un fotodiodo). Tanto la fuente de luz como el receptor se instalan estrictamente en partes fijas del cojinete de conexión giratorio.
El codificador es un disco de sombreado con una abertura o ventana transparente, que se instala en la parte giratoria del rodamiento.
3.2 Principio de los codificadores digitales fotoeléctricos
Cuando el rodamiento gira, el codificador permite que el haz de luz se alterne (pase a través de la pequeña ventana del disco).
El fotodiodo emite las correspondientes señales de nivel alto o bajo según cambie la posición. La salida del fotodiodo puede convertirse en información de posición y velocidad mediante un circuito especializado.
3.2.1 Salida de los codificadores incrementales
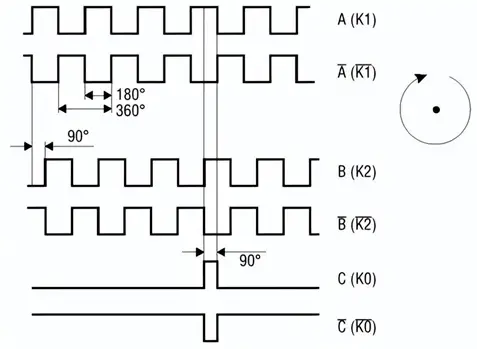
La salida del codificador incremental consiste en un disco fotoeléctrico de eje central con marcas circulares transparentes y opacas, que son leídas por componentes emisores y receptores fotoeléctricos para obtener señales de onda cuadrada combinadas como A, B, -A, -B.
Cada par de señales tiene una diferencia de fase C de 90 grados (un ciclo equivale a 360 grados).
Además, hay una señal de calibración de punto cero, y el codificador emite una señal por rotación del disco.
Diagrama esquemático de salida del codificador incremental
3.2.2 Principios de conexión de los codificadores incrementales
1. Conexión monofásica
Se utiliza para el recuento unidireccional y la medición unidireccional de la velocidad.
2. Conexión bifásica A-B
Se utiliza para el recuento bidireccional y para determinar la dirección y la velocidad.
3. Conexión trifásica A-B-C
Se utiliza para determinar la velocidad con corrección de la posición de referencia.
La conexión A-A-B-B-C-C tiene una corriente de conexión de señal negativa simétrica, que tiene una atenuación mínima y una fuerte antiinterferencia, y puede emitirse a largas distancias.
Cómo determinar la dirección
Dado que A y B están desfasados 90 grados, la dirección puede determinarse detectando si A o B ocurre primero.
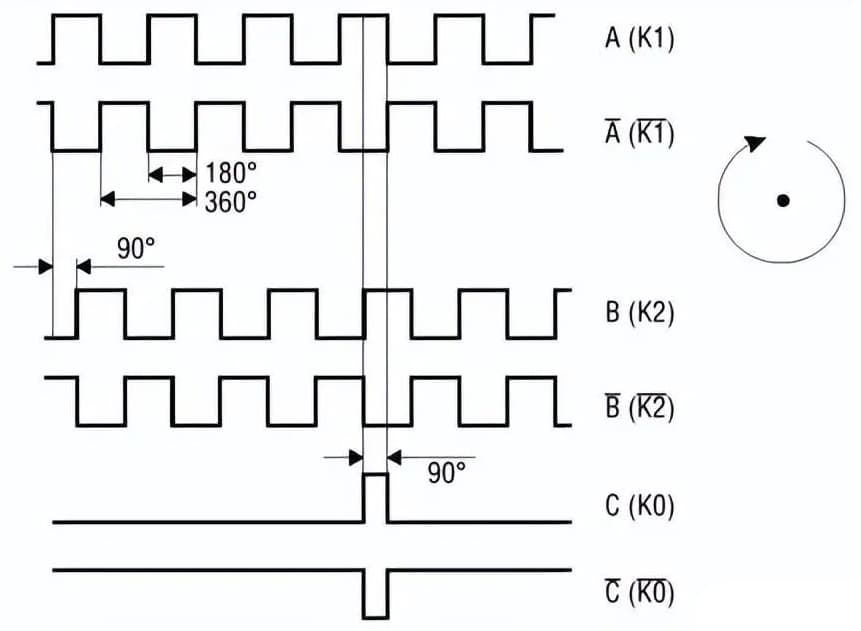
Cómo realizar la calibración de posición cero
Durante la transmisión de los impulsos del codificador, pueden producirse errores debido a razones tales como interferencias, lo que da lugar a errores de transmisión.
En este momento, es necesario realizar a tiempo la calibración de la posición cero.
El codificador C emite un impulso cada rotación, que se denomina impulso cero o impulso de identificación, y se utiliza para determinar la posición cero o de identificación.
Para medir con precisión el impulso cero, independientemente del sentido de giro, el impulso cero se emite como una combinación de alto nivel de dos canales.
Debido a la diferencia de fase entre los canales, el pulso cero sólo tiene la mitad de la longitud del pulso.
Diagrama esquemático de la corrección del punto cero
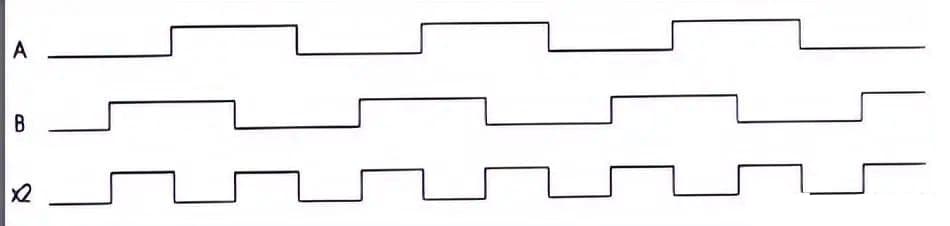
3.2.3 Multiplicador de codificadores incrementales
Debido a las limitaciones tecnológicas y de muestreo, es imposible lograr una división física más fina y precisa del disco de codificación.
Sin embargo, se pueden conseguir pulsos más altos mediante la conversión de circuitos digitales.
Señal de doble frecuencia
Se obtiene por conversión "exclusiva o" de las fases A y B.
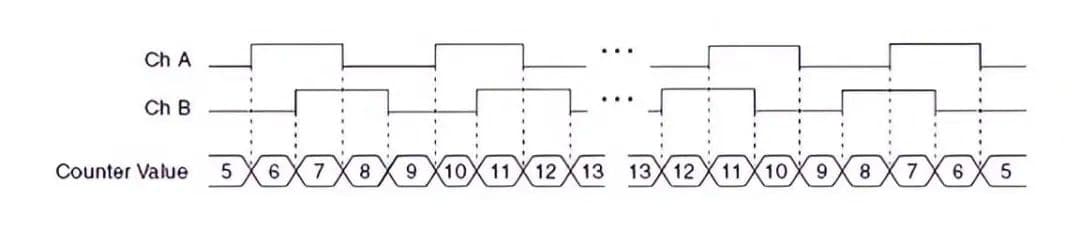
Señal de frecuencia cuádruple
El contador también aumenta o disminuye en cada flanco de los canales A y B. La dirección del contador viene determinada por qué canal adelanta al otro.
El número del contador aumenta o disminuye en 4 en cada ciclo.
3.2.4 Características de los codificadores incrementales
El codificador emite una señal de impulso para cada ángulo de giro preestablecido, y el ángulo de giro se calcula contando el número de señales de impulso.
Por lo tanto, los datos de posición emitidos por el codificador son relativos.
Dado que se utiliza una señal de impulso fija, la posición inicial del ángulo de rotación puede establecerse arbitrariamente.
Debido al uso de la codificación relativa, los datos del ángulo de rotación se perderán y será necesario restablecerlos tras un corte de corriente.
3.2.5 Problemas con los codificadores incrementales
1) Los encóderes incrementales tienen errores acumulativos de punto cero.
2) Tienen poca capacidad antiinterferente.
3) Es necesario apagar el dispositivo receptor y volver a encontrar la posición de referencia después de apagones o cortes de corriente.
La aparición de los codificadores absolutos resuelve estos problemas.
3.3 Principio del encóder absoluto
Un encóder absoluto tiene un disco de código luminoso con varios canales luminosos y líneas grabadas en él.
Cada canal se codifica utilizando 2, 4, 8, 16 y así sucesivamente.
En cada posición del codificador, se leen los canales de luz y se utiliza su estado de encendido/apagado para obtener un código binario único, conocido como código Gray, que va de 2^0 a 2^(n-1), donde n es el número de bits del codificador absoluto.
La posición del codificador se determina mecánicamente mediante el disco de código luminoso, por lo que no se ve afectada por cortes de corriente o interferencias.
3.3.1 Disco codificador del codificador absoluto
El disco de código luminoso es escaneado por un grupo de acopladores fotoeléctricos para obtener el código único en cada posición. Cada posición tiene su propio código único.
Los códigos de salida de los codificadores absolutos son:
Los números enteros adyacentes en su representación numérica sólo tienen una diferencia, lo que puede evitar la aparición de grandes picos de corriente en el circuito de conversión digital (como 3-4, 0011-0100).
Formato de conversión de códigos binarios a grises:
Los dígitos más altos se conservan, y el segundo dígito más alto se obtiene realizando una operación "or exclusivo" sobre los dígitos más altos y el segundo dígito más alto (en binario).
Referencia para códigos decimales y grises.
Decimal
Código gris
0
0000
1
0001
2
0011
3
0010
4
0110
5
0111
6
0101
7
0100
Decimal
Código gris
8
1100
9
1101
10
1111
11
1110
12
1010
13
1011
14
1001
15
1000
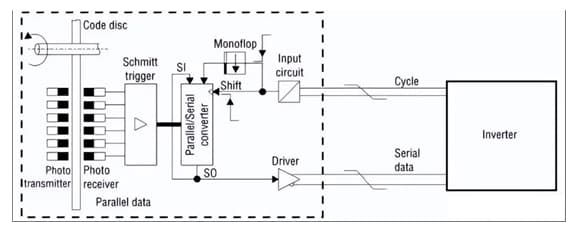
3.3.2 Formatos de salida de los codificadores absolutos
1. Modo de salida en paralelo
En este modo, hay un cable para cada bit de datos (canal de bits), y el nivel de señal (alto o bajo) en cada cable representa un 1 o un 0.
El dispositivo físico es similar a un codificador incremental y tiene diferentes tipos como colector abierto PNP, NPN, accionamiento diferencial, push-pull, y diferencial alto o bajo efectivo basado en el formato del dispositivo físico.
La salida paralela se presenta generalmente en forma de código Gray, también llamado codificador de código Gray.
2. Salida de interfaz serie síncrona (SSI)
En este modo, los datos se concentran y se transmiten a través de un grupo de cables. La salida de datos se ordena mediante un protocolo de comunicación que especifica la temporización.
La salida serie utiliza menos líneas de conexión y puede transmitir a mayores distancias, lo que mejora enormemente la protección y fiabilidad del codificador.
Los encóderes absolutos de alto bit y los encóderes absolutos multivuelta suelen utilizar salida serie.
3. Formato serie asíncrono
En este modo, las instrucciones y los datos se intercambian mediante preguntas y respuestas, y la interfaz es dúplex. Un ejemplo típico es la interfaz RS485, que sólo requiere dos cables.
El contenido de los datos puede ser el valor de posición del encoder u otro contenido solicitado por la instrucción.
Por ejemplo, si se añade una dirección para cada codificador, varios codificadores pueden compartir el cable de transmisión y la posterior recepción. Esta forma se denomina tipo bus de campo.
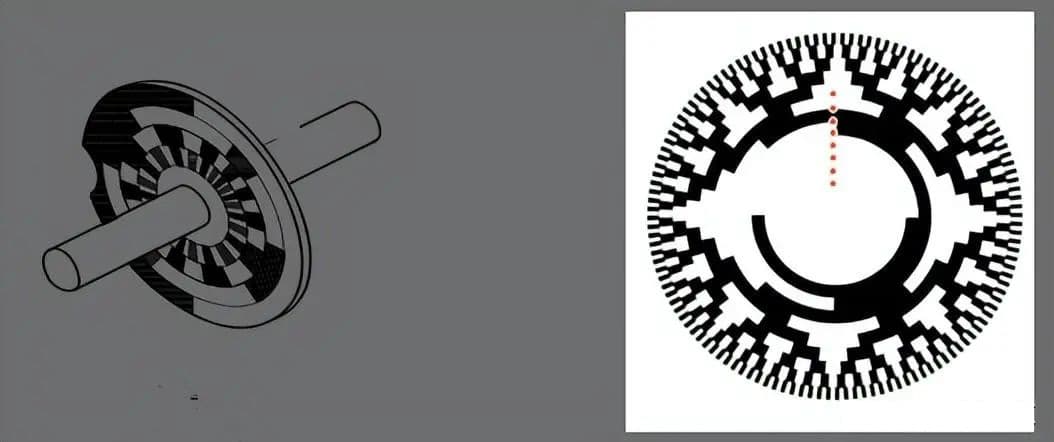
4. Principio del codificador híbrido
La codificación incremental y la absoluta están integradas en el mismo disco.
El círculo más externo del disco contiene bandas incrementales de alta densidad, mientras que la parte central es el canal de código Gray binario del codificador absoluto.
La rotación del disco se indica contando el número de impulsos por rotación, y el ángulo girado en una semana se cuenta utilizando el valor numérico del código Gray.
Encoder absoluto multivuelta: Basado en el codificador absoluto de una vuelta, se utiliza el principio del mecanismo de engranaje de reloj para transmitir la rotación del disco central a otro conjunto de discos (o conjuntos múltiples de engranajes y discos) mediante la transmisión por engranaje, lo que añade la codificación del número de vueltas sobre la base de la codificación de una vuelta para ampliar el rango de medición del codificador.
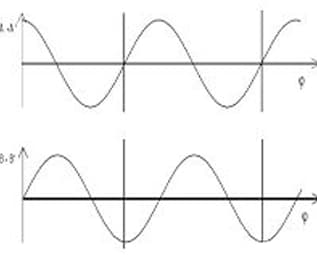
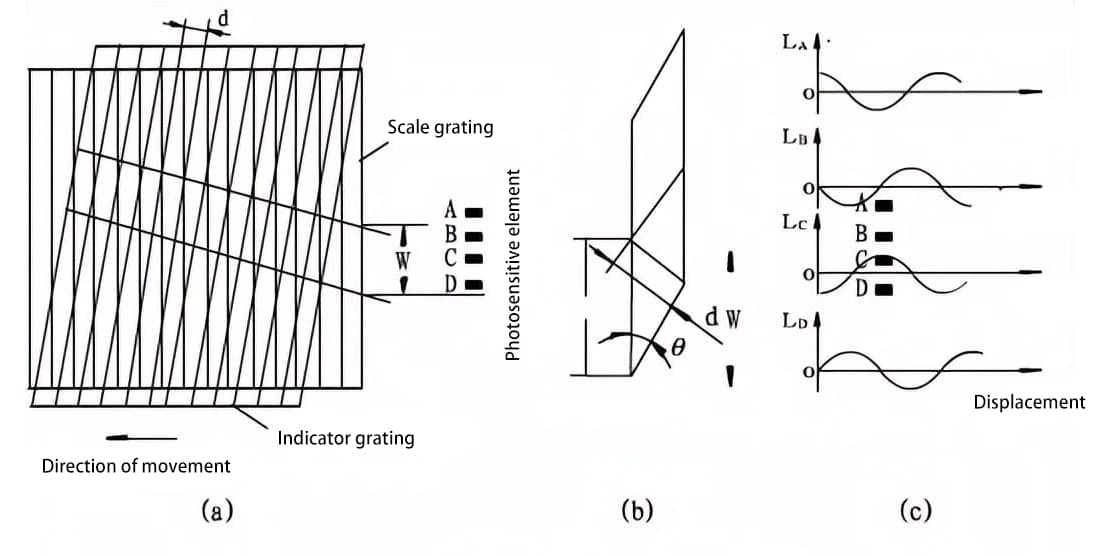
Cuando una luz paralela atraviesa una rejilla, la intensidad de las franjas de Moiré producidas se aproxima a una función coseno.
Colocando cuatro franjas de Moiré de 1/4 de elementos fotosensibles en la dirección del movimiento de la franja de Moiré, se pueden obtener cuatro conjuntos de señales de salida de seno y coseno.
Forma de salida del codificador seno-coseno
Figura Principio de funcionamiento de la rejilla
Codificador lineal
Un codificador lineal mide la distancia de desplazamiento lineal de un objeto y convierte la distancia medida en una salida de señal eléctrica de impulsos.
En términos sencillos, el principio consiste en estirar el disco de un codificador rotatorio en línea recta.
Codificador de escala de rejilla
El principio de funcionamiento del sensor de desplazamiento de rejilla es que cuando la rejilla maestra (es decir, la rejilla de escala) y la rejilla auxiliar (es decir, la rejilla indicadora) del par de rejillas se desplazan relativamente, la interferencia y la difracción de la luz producen un patrón rayado regular en blanco y negro (o claro-oscuro), denominado franja de Moiré.
Las franjas en blanco y negro (o claro-oscuro) que son iguales se convierten en señales eléctricas que cambian sinusoidalmente mediante dispositivos fotoeléctricos.
Tras la amplificación y conformación mediante circuitos conformadores, se obtienen dos señales de onda sinusoidal o cuadrada con una diferencia de fase de 90 grados y se envían a la pantalla digital de rejilla para su recuento y visualización.
Transformador rotativo
Un transformador rotativo, también conocido como resolver, es un tipo de micromotor utilizado con fines de control.
Es un dispositivo de medición indirecta que convierte la rotación mecánica en una señal eléctrica que se relaciona con el ángulo de rotación mediante una determinada función matemática.
Principio del transformador rotativo
1. Un transformador rotativo es un componente de señal que emite una tensión que varía con el ángulo del rotor.
Cuando el devanado de excitación es excitado por una tensión alterna de cierta frecuencia, la amplitud de tensión del devanado de salida está en una relación de función seno o coseno con el ángulo del rotor, o mantiene una cierta relación proporcional, o tiene una relación lineal con el ángulo del rotor dentro de un cierto rango.
2. La distribución del flujo magnético entre el estator y el rotor del transformador rotativo sigue una regla sinusoidal.
Por lo tanto, cuando la tensión de excitación se aplica al devanado del estator, el devanado del rotor genera una fuerza electromotriz inducida a través del acoplamiento electromagnético, como se muestra en la figura anterior.
La magnitud de la tensión de salida depende de la posición angular del rotor y, por tanto, varía sinusoidalmente con el desplazamiento del rotor.
Según el principio del transformador, suponiendo que el número de espiras del devanado primario es N1 y el número de espiras del devanado secundario es N2, k = N1 / N2 es la relación de espiras. Cuando se aplica una tensión alterna al devanado primario
Aplicación del transformador rotativo
1. Modo de detección de fase
El ángulo de fase de la tensión inducida es igual al ángulo de rotación mecánica del rotor.
Por lo tanto, siempre que se detecte el ángulo de fase de la tensión de salida del rotor, se conocerá el ángulo de rotación del rotor.
2. Modo de detección de amplitud
En aplicaciones prácticas, modificando continuamente el ángulo eléctrico de la tensión de modulación, se puede seguir la variación del ángulo mecánico y medir la amplitud de la tensión inducida para obtener el desplazamiento del ángulo mecánico.
5. Precauciones de instalación de los codificadores
Aspectos mecánicos:
1. Preste atención a la carga admisible del eje durante la instalación;
2. Asegúrese de que la diferencia de eje del eje del codificador y el usuario eje de salida es inferior a 0,20 mm, y el ángulo de desviación del eje es inferior a 1,5°;
3. Durante la instalación, evite golpes, caídas y choques para evitar daños en el eje y el disco;
4. Durante el uso prolongado, compruebe regularmente si los tornillos que fijan el codificador están flojos (una vez por trimestre).
Aspectos eléctricos:
1)El cable de tierra debe ser lo más grueso posible, generalmente superior a 1,5 milímetros cuadrados;
2)Los cables de salida del codificador no deben solaparse entre sí para evitar daños en el circuito de salida;
3)Los cables de señal del encoder no deben conectarse a corriente continua o alterna para evitar daños en el circuito de salida;
4)Los equipos, como los motores, conectados al codificador deben estar bien conectados a tierra y libres de electricidad estática.
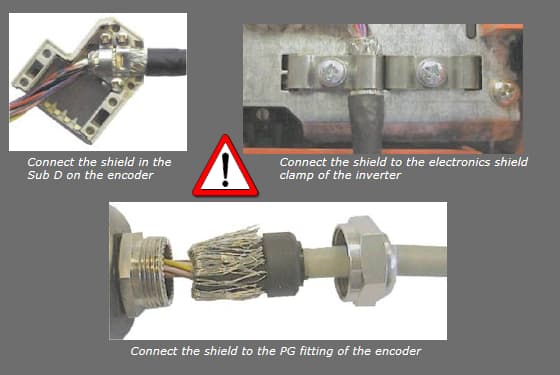
6. Instalación del cable de apantallamiento del codificador.
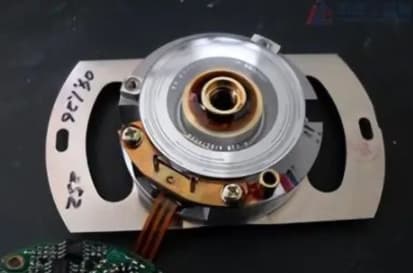
Esquema de la estructura interna de un codificador rotatorio.
Como fundador de MachineMFG, he dedicado más de una década de mi carrera a la industria metalúrgica. Mi amplia experiencia me ha permitido convertirme en un experto en los campos de la fabricación de chapa metálica, mecanizado, ingeniería mecánica y máquinas herramienta para metales. Estoy constantemente pensando, leyendo y escribiendo sobre estos temas, esforzándome constantemente por mantenerme a la vanguardia de mi campo. Deje que mis conocimientos y experiencia sean un activo para su empresa.
Conceptos básicos del diseño asistido por ordenador y la fabricación asistida por ordenador El diseño asistido por ordenador y la fabricación asistida por ordenador (CAD/CAM) es una disciplina de ingeniería de sistemas exhaustiva y técnicamente compleja que incorpora diversos campos como el [...]
Concepto de fabricación virtual La fabricación virtual (FV) es la realización fundamental del proceso de fabricación real en un ordenador. Utiliza tecnologías de simulación por ordenador y realidad virtual, con el apoyo de [...]
Un sistema de fabricación flexible (FMS) suele emplear principios de ingeniería de sistemas y tecnología de grupos. Conecta máquinas herramienta de control numérico por ordenador (CNC) (centros de procesamiento), máquinas de medición por coordenadas, sistemas de transporte de materiales, [...].
Al igual que la tecnología de fabricación desempeña hoy un papel crucial en diversos campos, la tecnología de nanofabricación ocupa una posición clave en el ámbito de la nanotecnología. La tecnología de nanofabricación engloba numerosos métodos, entre ellos la [...]
El mecanizado de ultraprecisión se refiere a los procesos de fabricación de precisión que alcanzan niveles extremadamente altos de precisión y calidad superficial. Su definición es relativa y cambia con los avances tecnológicos. Actualmente, esta técnica puede alcanzar [...]
En la actualidad, el mecanizado puede clasificarse en dos grupos en función del lote de producción: Entre estas dos categorías, la primera representa alrededor del 70-80% del valor de producción total del mecanizado [...]
Este artículo presenta principalmente varios métodos maduros de procesamiento especial. I. Mecanizado por descarga eléctrica (EDM) El EDM es un método de mecanizado de materiales conductores que utiliza el fenómeno de la corrosión eléctrica durante [...].
¿Qué es el mecanizado CNC? El control numérico (CN) se refiere al método de controlar el movimiento y las operaciones de procesamiento de las máquinas herramienta utilizando información digitalizada. Las máquinas herramienta de control numérico, a menudo abreviadas [...]
El mecanizado de corte sigue siendo el método más destacado de procesamiento mecánico y desempeña un papel importante en la fabricación mecánica. Con el avance de la tecnología de fabricación, la tecnología de mecanizado por corte experimentó un progreso sustancial hacia [...].
1. Qué es la tensión de soldadura La tensión de soldadura se refiere a la tensión generada durante el proceso de soldadura en los componentes soldados. Esta tensión está provocada por el proceso térmico de soldadura y [...]
Los materiales avanzados son aquellos que se han investigado o se están desarrollando recientemente y que poseen un rendimiento excepcional y funcionalidades especiales. Estos materiales son de suma importancia para el avance de la ciencia y la tecnología, [...].
La deformación en abombamiento es adecuada para varios tipos de piezas en bruto, como copas embutidas, tubos cortados y soldaduras cónicas laminadas. Clasificación según el medio de conformado por abombamiento Los métodos de conformado por abombamiento pueden clasificarse [...]