Электронные двигатели: Типы, конструкции и анализ производительности
Что питает ваш электромобиль? От асинхронных двигателей переменного тока до синхронных двигателей с постоянными магнитами и даже двигателей с коммутируемым магнитным сопротивлением - каждый тип обладает уникальными преимуществами и недостатками. В этой статье рассматриваются структуры, принципы и области применения этих ключевых типов двигателей, что поможет вам понять, как они влияют на производительность и эффективность электромобилей. Погрузитесь в статью, чтобы узнать, какой двигатель может стать двигателем вашего следующего автомобиля!
Исходя из основных требований к характеристикам приводного двигателя для новых энергетических транспортных средств, широко используемые типы приводных двигателей делятся на три основные категории: асинхронные двигатели переменного тока, синхронные двигатели с постоянными магнитами и двигатели с коммутируемым редуктором.
В настоящее время в каждой модели автомобиля, выпускаемой различными автомобильными компаниями, используются различные типы приводных двигателей.
Поэтому, чтобы выбрать тип двигателя для нового энергетического транспортного средства, важно понимать структуру, принцип работы, преимущества и недостатки приводного двигателя.
I. Асинхронный двигатель переменного тока
1. Структура асинхронного двигателя переменного тока
Асинхронный двигатель переменного тока, также известный как асинхронный двигатель, в основном состоит из статора, ротора, вала двигателя, передних и задних подшипников, торцевой крышки, датчика положения, датчика температуры, жгута проводов низкого напряжения и жгута проводов высокого напряжения.
Статор состоит из железного сердечника статора и трехфазной обмотки; в роторе часто используется короткозамкнутый ротор, который включает в себя железный сердечник ротора и короткозамкнутую обмотку.
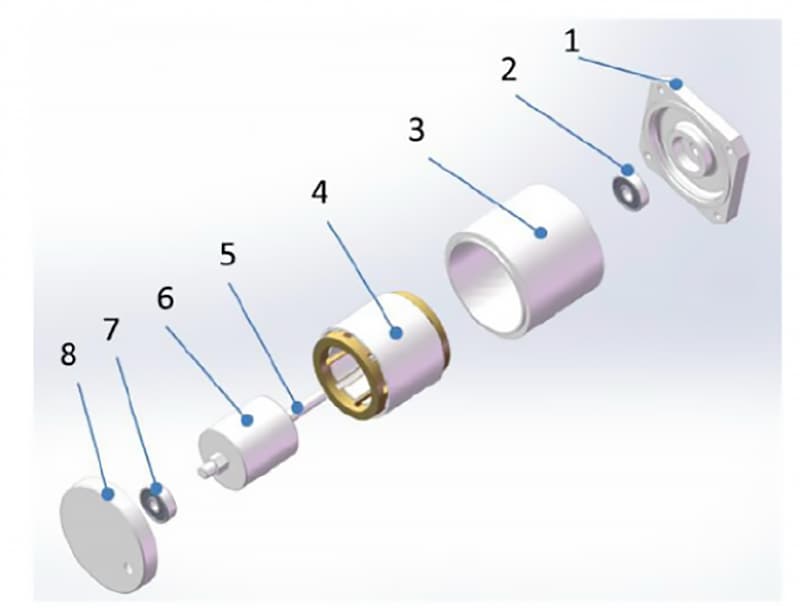
В зависимости от мощности двигателя выбирается метод водяного или воздушного охлаждения. (Рисунок 1)
Рисунок 1 Структурная схема асинхронного двигателя переменного тока
1- Передняя торцевая крышка 2- Передний подшипник 3- Корпус двигателя 4- Ротор с беличьей клеткой 5- Вал двигателя 6- Статор 7- Задний подшипник 8- Крышка заднего торца 9- Датчик положения 10- Крышка для обслуживания датчика
2. Принцип работы асинхронного двигателя переменного тока
(1) Принцип работы асинхронного электропривода переменного тока
1) Статор обеспечивает вращающееся магнитное поле. Чтобы обеспечить крутящий момент, асинхронный двигатель переменного тока должен пропускать трехфазный переменный ток через обмотку статора, создавая постоянно вращающееся магнитное поле (со скоростью вращения магнитного поля ns).
Асинхронный двигатель переменного тока требует, чтобы трехфазные обмотки статора были симметричны, а железные сердечники статора находились на расстоянии 120 электрических градусов друг от друга. Ток, проходящий через трехфазную симметричную обмотку, также должен быть симметричным, с одинаковой величиной, частотой и разностью фаз в 120 градусов. Скорость вращения вращающегося магнитного поля задается уравнением (1).
ns=60f/p (1)
В этом уравнении ns - скорость вращения вращающегося магнитного поля (также известная как синхронная скорость), об/мин; f - частота трехфазного переменного тока, Гц; p - количество пар полюсов.
Для разработанного и запущенного в производство приводного двигателя число пар полюсов фиксировано, поэтому фактором, определяющим скорость вращения магнитного поля, является частота трехфазного переменного тока. Поскольку частота электросети в нашей стране составляет f=50 Гц, существует линейная зависимость между скоростью вращения двигателя и количеством пар полюсов. (Рисунок 2)
Рисунок 2 Диаграмма вращающегося магнитного поля двухполюсной обмотки статора
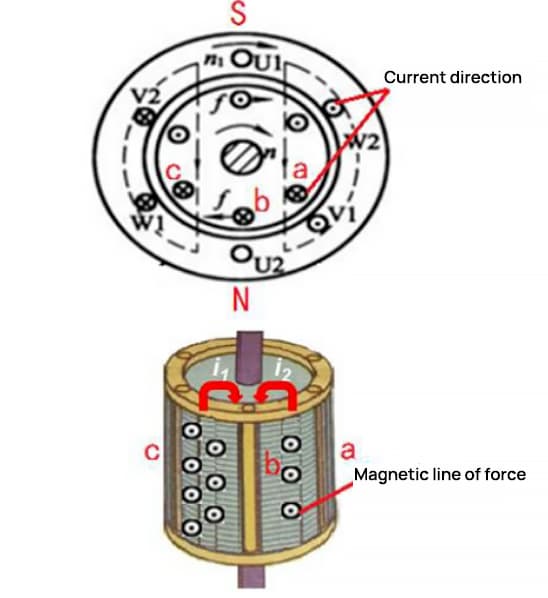
2) Ротор с короткозамкнутым ротором обеспечивает индуцированные вихревые токи. Поскольку статор создает вращающееся магнитное поле, в проводниках короткозамкнутого ротора наводятся вихревые токи, как показано на рисунке 3.
Рисунок 3 Вихревые токи в обмотках сепараторного ротора
В магнитной области между проводниками c и b короткозамкнутой обмотки возникают внешние магнитные линии, которые усиливаются под действием вращающегося магнитного поля.
Поэтому в проводниках c, b будет наведен вихревой ток i1; аналогично, ослабление магнитных силовых линий в области между проводником a и проводником b вызовет в проводнике вихревой ток i2.
Ток в проводнике b под действием вращающегося магнитного поля статора приводит к тому, что на короткозамкнутый виток обмотки b действует электромагнитная сила, в результате чего ротор генерирует электромагнитный момент и начинает вращаться. Вращающийся ротор постепенно догоняет вращающееся магнитное поле, вращаясь со скоростью n, немного меньшей, чем "синхронная скорость ns" магнитного поля.
Это явление, когда скорость вращения ротора n немного меньше скорости вращения магнитного поля статора ns, называется проскальзыванием ротора. Такое асинхронное скольжение позволяет проводнику короткозамкнутого ротора непрерывно рассекать магнитные силовые линии, создавая индукционные вихревые токи.
Таким образом, на роторе электрическая энергия преобразуется в механическую, обеспечивая непрерывную работу внешнего источника.
(2) Принцип генерации энергии в асинхронных двигателях переменного тока
Согласно закону электромагнитной индукции Фарадея, когда участок замкнутого проводника пересекает силовые линии магнитного поля в движении, в проводнике возникает индукционный ток, а возникшая электродвижущая сила называется индуцированной электродвижущей силой.
В асинхронном двигателе переменного тока, когда двигатель используется в качестве генератора, статор питается трехфазным током для создания магнитного поля, а обмотка ротора служит проводником.
Когда внешняя механическая сила, например, приводной вал автомобиля, приводит в движение вал ротора, заставляя его двигаться. Если скорость вращения ротора выше синхронной скорости вращающегося магнитного поля статора, асинхронный двигатель переменного тока работает как генератор.
Направление ротора, разрезающего вращающееся магнитное поле, противоположно тому, когда он работает как приводной двигатель, поэтому направление индуцированной электродвижущей силы ротора также обратное.
В процессе выработки энергии ротор двигателя испытывает электромагнитный момент, противоположный внешней силе тяги, что приводит к снижению скорости вращения ротора.
3. Преимущества, недостатки и области применения асинхронных двигателей переменного тока
Асинхронные двигатели переменного тока обеспечивают регулируемый выходной крутящий момент в широком диапазоне и способны принудительно увеличивать выходной крутящий момент в течение коротких периодов времени при разгоне или подъеме. В электромобилях, приводимых в движение синхронными двигателями с постоянными магнитами, часто используются дополнительные механизмы коробки передач для увеличения крутящего момента с целью повышения скорости.
Однако асинхронные двигатели переменного тока имеют ряд недостатков. Из-за одностороннего возбуждения они требуют больших пусковых токов и большего тока на единицу создаваемого крутящего момента. В статоре возникают реактивные токи возбуждения, что приводит к более высокому потреблению энергии по сравнению с синхронными двигателями с постоянными магнитами, а также к снижению коэффициента мощности.
При работе приводов в тяжелых условиях часто возникают перегрузки. Их относительно сложная структура требует высокой квалификации в области технологий управления, что делает их более дорогими в производстве, и они имеют сравнительно низкую удельную мощность.
В настоящее время асинхронные двигатели переменного тока широко используются в качестве приводных двигателей в электромобилях, разработанных в США.
II. Синхронный двигатель с постоянным магнитом
1. Структура синхронного двигателя с постоянными магнитами
Конструкция синхронного двигателя с постоянными магнитами включает в себя статор, ротор, вал двигателя, передние и задние подшипники, торцевую крышку, канал охлаждающей жидкости, датчик положения, датчик температуры, жгут низкого напряжения и силовой жгут.
Статор состоит из железного сердечника статора и трехфазных обмоток; ротор состоит из полюсов постоянного магнита и железного сердечника, причем железный сердечник изготовлен из сложенных листы кремнистой стали.
Расположение постоянных магнитов в роторе в основном включает в себя роторы с поверхностным монтажом, роторы с поверхностным монтажом и внутренние роторы с постоянными магнитами, причем внутренние роторы с постоянными магнитами обычно используются в новых энергетических двигателях. (Рисунок 4)
Рисунок 4 Схематическая диаграмма синхронного двигателя с постоянными магнитами конструкция двигателя
1- Передняя торцевая крышка 2- Подшипник переднего конца 3- Корпус двигателя 4- Статор 5- Вал двигателя 6- Встроенный ротор с постоянным магнитом 7- Подшипник заднего конца 8- Крышка заднего торца (встроенный датчик положения)
2. Принцип работы синхронного двигателя с постоянным магнитом
(1) Принцип работы синхронного двигателя с постоянным магнитом
Вращающееся магнитное поле обеспечивается статором, создаваемым таким же образом и с такой же скоростью, как и в асинхронном двигателе переменного тока. Магнитные полюса обеспечиваются постоянными магнитами ротора.
Таким образом, вращающееся магнитное поле, создаваемое статором, образует цепь с полюсами постоянного магнита и железным сердечником ротора. Следуя принципу минимального магнитного сопротивления, т.е. магнитный поток всегда замыкается по пути наименьшего магнитного сопротивления, ротор притягивается во вращение электромагнитной силой вращающегося поля.
Таким образом, ротор с постоянными магнитами синхронно вращается с вращающимся магнитным полем, создаваемым статором, приводя тем самым во вращение вал двигателя.
(2) Принцип генерации энергии синхронным двигателем с постоянными магнитами
Согласно закону электромагнитной индукции Фарадея, часть проводников замкнутого контура питается от трехфазных обмоток статора, а магнитное поле обеспечивается постоянными магнитами ротора.
Когда внешний крутящий момент приводит ротор во вращение, он генерирует вращающееся магнитное поле, пронизывающее часть проводников в трехфазных обмотках статора и вызывающее симметричный трехфазный ток.
В этот момент кинетическая энергия ротора преобразуется в электрическую, и синхронный двигатель с постоянными магнитами работает как генератор.
3. Преимущества, недостатки и область применения синхронного двигателя с постоянными магнитами
К преимуществам синхронного двигателя с постоянными магнитами относятся малые размеры, небольшой вес, высокая удельная мощность, низкое энергопотребление, меньшее повышение температуры и более высокий КПД по сравнению с асинхронными двигателями.
В зависимости от требований он может быть разработан как структурированный двигатель с высоким пусковым моментом и высокой перегрузочной способностью.
Синхронный двигатель с постоянным магнитом строго синхронизируется и имеет хорошие динамические характеристики, подходит для частотного регулирования; крутящий момент и скорость двигателя можно регулировать в широком диапазоне, изменяя ток и частоту.
Однако материал постоянного магнита, используемый в синхронных двигателях с постоянным магнитом, обычно представляет собой неодим-железо-борный магнитный материал, который является относительно хрупким и может разрушиться при сильной вибрации.
Кроме того, использование в роторе материала с постоянными магнитами может привести к затуханию магнитного поля в процессе работы двигателя и перегреву, что влечет за собой снижение мощности.
В настоящее время синхронные двигатели с постоянными магнитами широко используются в автомобильных двигателях новой энергии, причем на рынках новой энергии в Азии и Европе в основном используются синхронные двигатели с постоянными магнитами в качестве двигателей новой энергии.
III. Переключаемый редукционный двигатель
1. Структура редукторного двигателя
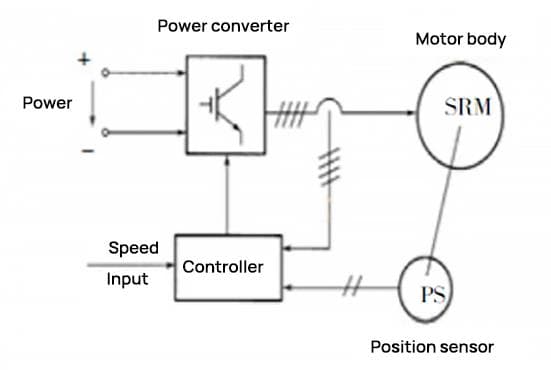
Двигатель с коммутируемыми реактивными элементами (SRM) - это типичный мехатронный двигатель, также известный как "система привода с коммутируемыми реактивными элементами". Двигатель включает в себя четыре компонента: сам SRM, силовой преобразователь, датчики положения ротора и контроллер, как показано на рисунке 5.
Рисунок 5 Системная блок-схема коммутируемого редукторного двигателя
Основная конструкция SRM включает в себя статор, ротор, датчики положения, передние и задние подшипники, передние и задние торцевые крышки и корпус двигателя, как показано на рисунке 6. Статор состоит из сердечника и обмоток.
Рисунок 6 Структура коммутируемого редукторного двигателя
1- Передняя торцевая крышка 2- Подшипник переднего конца 3- Ротор 4- Вал двигателя 5- Статор 6- Корпус двигателя 7- Подшипник заднего конца 8- Крышка заднего торца 9- Датчик положения 10- Крышка для обслуживания датчика 11- Охлаждающий вентилятор 12- Торцевая крышка вентилятора
И сердечник статора, и ротор имеют структуру с салиентными полюсами и состоят из ламинированных листов кремниевой стали. На салиентных полюсах статора расположены обмотки, в то время как ротор не имеет ни обмоток, ни постоянных магнитов.
Трехфазная структура 6/4 полюса означает, что статор двигателя имеет шесть полюсов, а ротор - четыре полюса. Концентрические обмотки на двух симметричных полюсах статора соединены последовательно, образуя фазу, а количество фаз равно количеству полюсов статора, деленному на два, как показано на рисунке 7(a).
Рисунок 7 Структура обмотки и полюса коммутируемого редукторного двигателя
Трехфазная структура 12/8 полюсов означает, что статор двигателя имеет двенадцать полюсов, а ротор - восемь полюсов. Обмотки на четырех симметричных полюсах статора соединены последовательно, образуя фазу, а количество фаз равно количеству полюсов статора, деленному на четыре, как показано на рисунке 7(b).
Чем больше фаз у двигателя с коммутируемым магнитным полем, тем меньше угол шага, тем плавнее работа и тем благоприятнее для снижения пульсаций крутящего момента. Однако управление становится более сложным, что приводит к увеличению количества основных коммутационных устройств и росту затрат.
Например, для трехфазного 6/4-полюсного двигателя угол шага α = 360° × 2/(6×4) = 30°.
2. Принцип работы коммутируемого редукторного двигателя
(1) Принцип работы привода редукторного двигателя с коммутацией
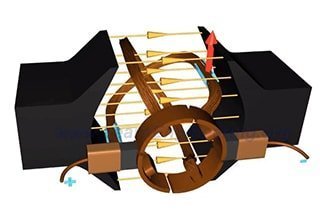
Как показано на принципиальной схеме трехфазного 12/8-полюсного SRM на рисунке 8, когда ток обмотки фазы A управляет главным выключателем S1, S2, чтобы замкнуть, фаза A находится под напряжением и намагничивается.
Рисунок 8 Принцип работы коммутируемого редукторного двигателя
Сила магнитного поля, возникающая в двигателе, образует радиальное магнитное поле с осью OA. Магнитные силовые линии этого поля изгибаются, проходя через воздушный зазор между магнитными полюсами статора и магнитными полюсами ротора.
В это время магнитное сопротивление магнитной цепи больше, чем при совпадении полюса статора и полюса ротора. Поэтому на полюса ротора действует магнитное притяжение, которое выравнивает ось полюсов ротора Oa с осью полюсов статора OA.
Это создает электромагнитный момент магнитного сопротивления, в результате чего ротор начинает вращаться против часовой стрелки. Когда ток фазы A отключается и включается источник питания фазы B, магнитное поле внутри двигателя поворачивается на 30 градусов.
Затем под действием электромагнитной тяги ротор поворачивается еще на 15 градусов против часовой стрелки. Если питание последовательно подается на фазные обмотки A-B-C-A, ротор будет постоянно вращаться против часовой стрелки.
При поочередном включении обмоток статора каждой фазы магнитное поле статора поворачивается на 3×30 градусов, а ротор вращается с шагом полюсов 3×15 градусов (т.е. 360 градусов / количество полюсов ротора).
Если питание последовательно подается на фазные обмотки A-C-B-A, ротор будет вращаться по часовой стрелке. Направление вращения импульсного двигателя не связано с направлением тока, а определяется последовательностью включения фазных обмоток статора.
В реальной работе многофазных двигателей часто бывает так, что две или более фазных обмоток включаются одновременно.
(2) Принцип работы генератора с коммутируемым магнитным полем
Рабочее состояние импульсного генератора включает в себя три состояния: состояние возбуждения, состояние продолжения работы и состояние выработки энергии, как показано на форме волны фазовой индуктивности L на рисунке 10.
Рисунок 9 Схематическое изображение рабочего состояния импульсного редукторного двигателя
Рисунок 10 Изменение индуктивности фазы при изменении положения ротора
На рисунке 9 угол θ определяется как угол между осью полюсов зубьев ротора и осью пазов зубьев статора. Когда ось полюса зуба ротора совпадает с соответствующей осью паза зуба статора, индуктивность фазы находится на минимальном уровне (определяется как θ=0°). Фазовая индуктивность обмотки остается постоянной на уровне Lmin до тех пор, пока передний край полюса ротора не совпадет с задним краем полюса статора (θ=θ1).
По мере того как ротор продолжает вращаться и полюс ротора начинает перекрываться полюсом статора, вплоть до полного совпадения заднего края полюса ротора и заднего края полюса статора (в это время θ=θ2), индуктивность фазы обмотки линейно увеличивается в этой области, достигая максимального значения Lmax.
Когда ротор продолжает вращаться так, что передний край полюса ротора выравнивается с передним краем полюса статора (в это время θ=θ4), индуктивность фазы остается на уровне Lmax.
Согласно основной теории электромагнитного поля, существование магнитного поля сопровождается электромагнитным моментом ротора двигателя, который может быть представлен уравнением (3).
Если включить и выключить обмотки коммутируемого редукторного двигателя между θ3 и θ4, двигатель работает как генератор. В это время в области уменьшающейся индуктивности возникает ток, поэтому dL/dθ<0.
Если в это время через фазные обмотки проходит ток, возникает тормозной момент (T(θ, i)<0). Если внешняя механическая сила поддерживает вращение двигателя, двигатель поглощает механическую энергию и преобразует ее в электрическую, что указывает на то, что импульсный двигатель работает в режиме генератора.
3. Преимущества, недостатки и область применения коммутируемых редукторных двигателей
Достоинствами импульсных двигателей являются простота и надежность конструкции, хорошие пусковые характеристики, высокий КПД и низкая стоимость. Они обеспечивают широкий диапазон возможностей регулирования скорости за счет изменения проводимости, угла отключения и напряжения. Однако к недостаткам относятся значительные пульсации крутящего момента и высокий уровень шума.
В настоящее время они используются в некоторых небольших транспортных средствах с электрическим приводом, таких как электрические четырехколесные скутеры и патрульные автомобили.
IV. Заключение
Учитывая различные эксплуатационные характеристики, требуемые от силовых установок новых энергомобилей, тип выбранного приводного двигателя варьируется в зависимости от модели, представленной на рынке.
В этой статье описаны структура и принципы работы широко используемых приводных двигателей новой энергии, таких как асинхронные двигатели переменного тока, синхронные двигатели с постоянными магнитами и двигатели с коммутируемым магнитным сопротивлением. Эта информация поможет лучше понять эти приводные двигатели.
Кроме того, структура и принципы работы каждого типа двигателя отличаются, что приводит к широкому спектру применений. В соответствии с национальным стратегическим планом развития промышленности, исследования, направленные на создание систем электропривода экологически чистых транспортных средств, работающих на новой энергии, будут продолжать расширяться. Соответственно, разнообразие и технологический уровень двигателей также будут расти.
Не забывайте, что делиться - значит заботиться! : )
Поделиться
Facebook
Twitter
LinkedIn
Reddit
VK
Электронная почта
Печать
Автор
Шейн
Основатель MachineMFG
Как основатель компании MachineMFG, я посвятил более десяти лет своей карьеры металлообрабатывающей промышленности. Мой обширный опыт позволил мне стать экспертом в области производства листового металла, механической обработки, машиностроения и станков для обработки металлов. Я постоянно думаю, читаю и пишу об этих предметах, постоянно стремясь оставаться на переднем крае своей области. Позвольте моим знаниям и опыту стать преимуществом для вашего бизнеса.
Вы когда-нибудь задумывались, как поезда могут парить над рельсами или как роботы достигают точных движений? Эта статья откроет вам увлекательный мир линейных двигателей, объяснит их принципы работы, типы и уникальные преимущества.....
Сервосистемы являются неотъемлемой частью электромеханических изделий, обеспечивая высочайший уровень динамического отклика и плотности крутящего момента. Поэтому тенденция развития приводных систем заключается в замене традиционных...
Вы когда-нибудь задумывались, что отличает двигатели постоянного тока от двигателей переменного тока? В этой статье мы рассмотрим фундаментальные различия между этими двумя типами двигателей, включая принципы их работы,...
В стремительно развивающемся мире промышленной автоматизации серводвигатели - это невоспетые герои, обеспечивающие точность и эффективность. Но в условиях, когда бесчисленные производители борются за внимание, как узнать, кто из них...
Вы когда-нибудь задумывались, как машины преобразуют невидимые силы в мощные механизмы? В этой статье блога мы исследуем увлекательный мир пневматических и гидравлических трансмиссий. Вы узнаете, как эти...
Вы когда-нибудь задумывались о том, что помогает миру вращаться равномерно? Невоспетые герои за кулисами - это подшипники. Эти маленькие, но могучие компоненты играют решающую роль в снижении трения...
Вы когда-нибудь задумывались, что приводит в движение машины, которые движут нашим миром? Редукторы - это невоспетые герои многих отраслей промышленности, от автомобилестроения до ветроэнергетики. В этой статье вы узнаете...
Выбор подходящего серводвигателя для вашего проекта может оказаться непростой задачей при наличии большого количества вариантов. Эта статья упрощает процесс, разбивая его на ключевые моменты: применение...
Как электродвигатели преобразуют электричество в движение? Представьте себе мир, в котором почти половина нашей энергии приводится в движение этими двигателями. Эта статья посвящена науке, лежащей в основе электродвигателей, и объясняет...