Почти половина мирового энергопотребления приходится на электродвигатели, поэтому повышение их эффективности считается наиболее эффективной мерой в решении глобальных энергетических проблем.
Типы двигателей
Как правило, двигатели преобразуют силу, возникающую при протекании тока в магнитном поле, во вращательное движение, но в широком смысле это также и линейное движение.
В зависимости от типа источника питания, приводящего в движение двигатель, их можно разделить на двигатели постоянного и переменного тока.
Кроме того, по принципу вращения двигателя их можно условно разделить на следующие категории, исключая специальные двигатели.
1. Двигатели постоянного тока
(1) Щеточные двигатели
Широко распространенные щеточные двигатели обычно называют двигателями постоянного тока. Они вращаются благодаря последовательному контакту электродов, называемых "щетками" (со стороны статора) и "коммутатором" (со стороны якоря), для переключения тока.
(2) Бесщеточные двигатели постоянного тока
Бесщеточные двигатели постоянного тока не требуют щеток и коммутаторов. Для переключения тока и получения вращательного движения в них используются транзисторы.
(3) Шаговые двигатели
Этот двигатель работает синхронно с импульсным питанием и поэтому также известен как импульсный двигатель. Его особенностью является способность легко достигать точного позиционирования.
2. Двигатели переменного тока
(1) Асинхронные двигатели
Переменный ток создает вращающееся магнитное поле в статоре, заставляя ротор индуктировать ток и вращаться под его воздействием.
(2) Синхронные двигатели
Переменный ток создает вращающееся магнитное поле, и ротор с магнитными полюсами вращается за счет притяжения. Скорость вращения синхронизирована с частотой питания.
Шаговый двигатель
Щеточный двигатель постоянного тока
Бесщеточный двигатель постоянного тока
Ток, магнитное поле и сила
Прежде всего, чтобы облегчить последующие объяснения принципов работы двигателя, давайте вернемся к основным законам/правилам, касающимся тока, магнитного поля и силы.
Хотя они могут вызывать чувство ностальгии, эти знания можно легко забыть, если магнитные компоненты не используются регулярно.
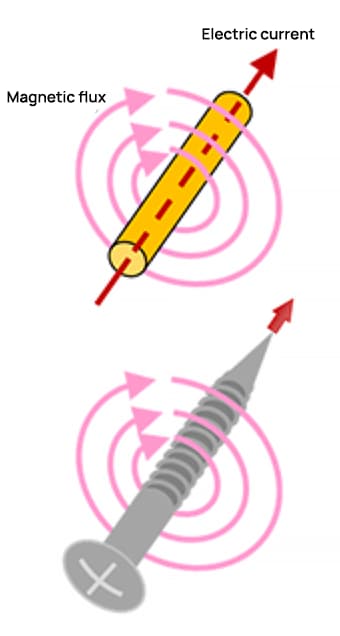
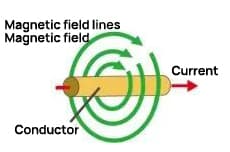
Закон Ампера (правило правого винта)
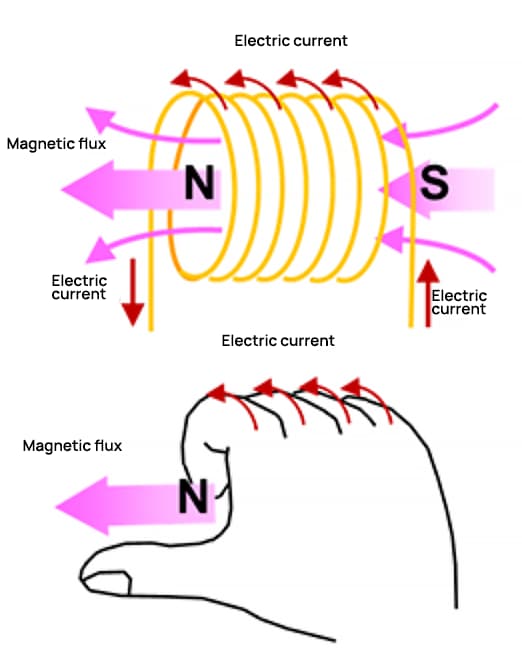
Магнитный поток, создаваемый током в катушке
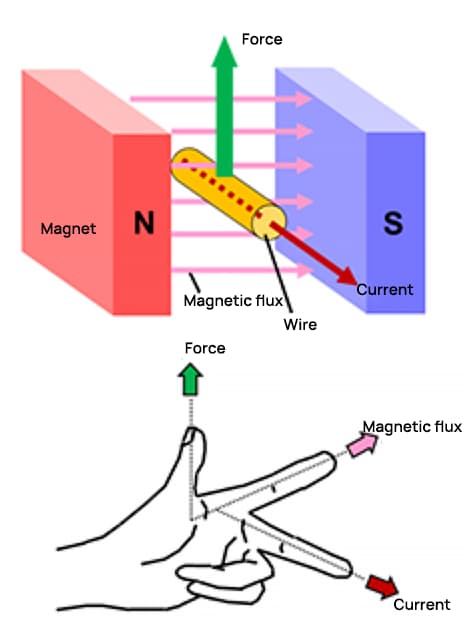
Основано на правиле левой руки Флеминга
Мы проиллюстрируем это с помощью изображений и уравнений.
Схема вращения двигателя
Если проволочная рамка прямоугольная, необходимо учесть силу, действующую на ток. Сила F, действующая на части a и c каркаса, равна:
Крутящий момент возникает вокруг центральной оси. Например, если рассматривать состояние, когда угол поворота составляет всего θ, то сила, действующая под прямым углом к b и d, равна sinθ. Следовательно, крутящий момент Ta в части a представлен следующей формулой:
Если рассматривать часть C аналогичным образом, то крутящий момент удваивается, создавая крутящий момент, рассчитанный по следующей формуле:
Учитывая, что площадь прямоугольника равна S = h*l, подставив ее в ранее приведенную формулу, можно получить следующий результат:
Эта формула применима не только к прямоугольникам, но и к другим распространенным фигурам, таким как круги. Этот принцип лежит в основе работы электродвигателей.
Как вращается двигатель?
1) Двигатели вращаются за счет использования магнитов и магнитной силы.
Вокруг постоянного магнита с вращающимся валом:
① Поверните магнит (чтобы создать вращающееся магнитное поле).
② Это следует из принципа, что противоположные полюса (N и S) притягиваются, а схожие отталкиваются.
③ Магнит с вращающимся валом будет вращаться.
Это основной принцип вращения двигателя.
Ток, проходящий через проводник, создает вокруг него вращающееся магнитное поле, заставляя магнит вращаться, что, по сути, представляет собой то же самое состояние движения.
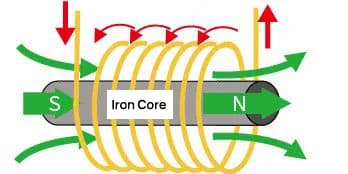
Более того, когда проводник наматывается на катушку, магнитные силы синтезируются, образуя большой магнитный поток, создающий северный и южный полюс.
Кроме того, вставка черной сердцевины в намотанный проводник облегчает прохождение силовых линий магнитного поля, создавая тем самым более сильную магнитную силу.
2) Эксплуатационные вращающиеся двигатели
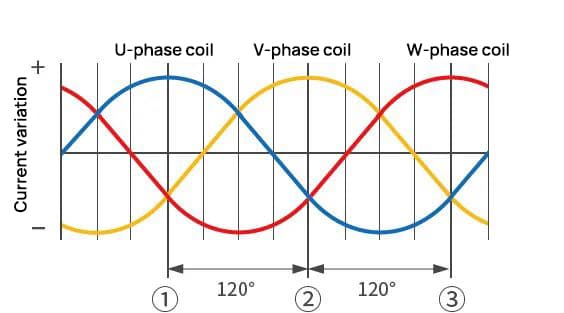
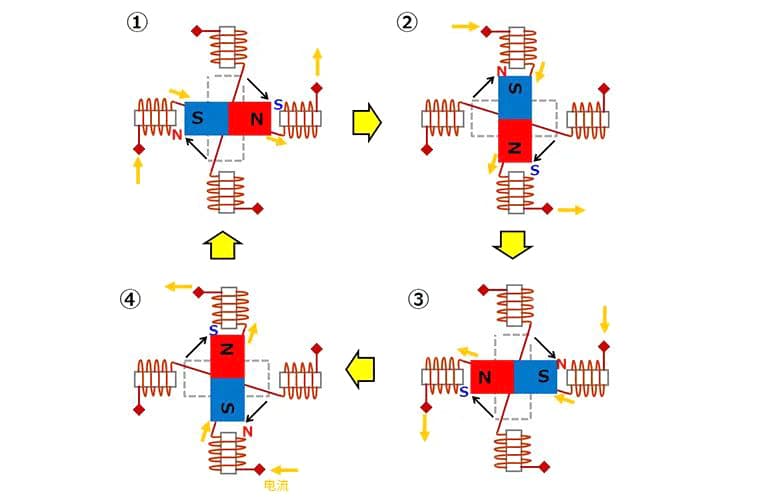
В этом контексте мы представляем практический подход к вращающимся двигателям, демонстрируя использование трехфазного переменного тока и катушек для создания вращающегося магнитного поля. (Трехфазный переменный ток относится к переменным сигналам, сфазированным с интервалом 120°).
Синтезированное магнитное поле в вышеупомянутом состоянии ① соответствует рисунку ① ниже.
Синтезированное магнитное поле в ранее упомянутом состоянии ② совпадает с рисунком ②, показанным ниже.
Синтезированное магнитное поле, связанное с вышеупомянутым состоянием ③, изображено на рисунке ③ ниже.
Как было сказано выше, катушка, намотанная на железный сердечник, разделена на три фазы: U-фазную катушку, V-фазную катушку и W-фазную катушку, расположенные с интервалом 120°. Катушка с более высоким напряжением создает северный полюс, а катушка с более низким напряжением - южный полюс.
Каждая фаза изменяется в соответствии с синусоидой, поэтому полярность (северный или южный полюс) и магнитное поле (магнитная сила), создаваемое каждой катушкой, будут меняться.
В этот момент, если рассматривать только катушку, создающую северный полюс, последовательность изменений идет от U-фазной катушки к V-фазной, затем к W-фазной и, наконец, обратно к U-фазной, что приводит к вращению.
Структура малых двигателей
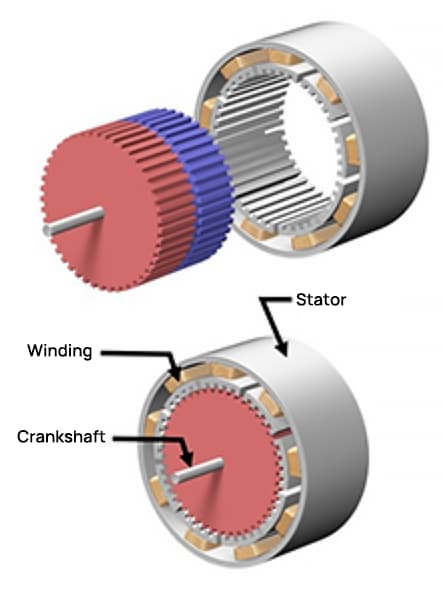
На рисунке ниже представлена общая конструкция и сравнение трех типов двигателей: шаговых, щеточных двигателей постоянного тока (DC) и бесщеточных двигателей постоянного тока (DC).
Основные компоненты этих двигателей включают в себя катушки, магниты и роторы. В связи с разнообразием типов они подразделяются на катушечные и магнитные.
Шаговый двигатель
Щеточный двигатель постоянного тока
Бесщеточный двигатель постоянного тока
Ниже приводится описание структуры, связанной с примером диаграммы. Пожалуйста, поймите, что этот документ представляет структуру в общих рамках, так как могут существовать и другие структуры, если их разделить более подробно.
Катушки шагового двигателя здесь закреплены снаружи, а магниты вращаются внутри; магниты щеточного двигателя постоянного тока закреплены снаружи, а катушки вращаются внутри.
Подача питания на катушки и изменение направления тока осуществляются щетками и коммутаторами; в бесщеточных двигателях катушки закреплены снаружи, а магниты вращаются внутри.
Из-за различий в типах двигателей, даже при одинаковых базовых компонентах, их конструкции могут отличаться. Конкретные детали будут описаны в каждом разделе.
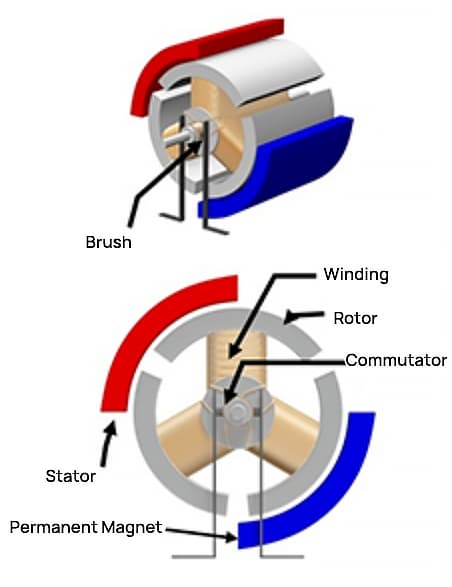
Щеточный двигатель
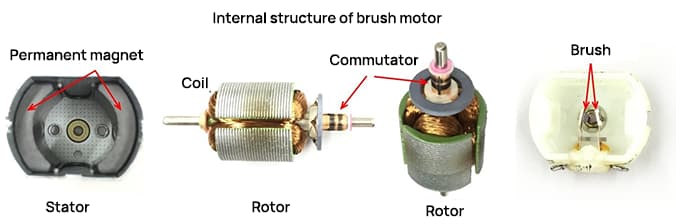
Структура щеточного двигателя
На изображении ниже показан внешний вид щеточного двигателя постоянного тока, обычно используемого в моделях, а также покомпонентное изображение типичного двухполюсного (два магнита) и трехслотового (три катушки) двигателя. Многие могут иметь опыт разборки двигателей и извлечения магнитов.
В щеточном двигателе постоянного тока постоянные магниты неподвижны, а катушки могут вращаться вокруг внутреннего центра. Неподвижная сторона называется "статор", а вращающаяся - "ротор".
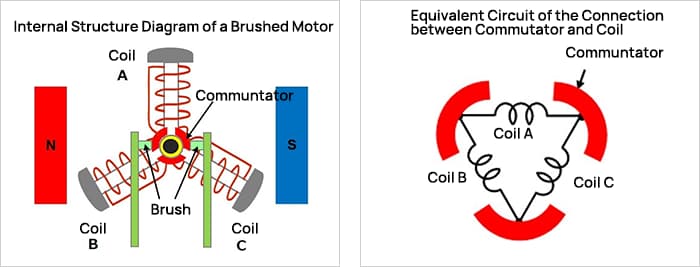
Вот схема, иллюстрирующая структурные концепции.
Центральная ось вращения окружена тремя коммутаторами - изогнутыми металлическими пластинами, используемыми для коммутации электрического тока. Для предотвращения контакта друг с другом коммутаторы расположены на расстоянии 120° друг от друга (360° ÷ 3 единицы). Эти коммутаторы вращаются вместе с осью.
Каждый коммутатор соединен с одним концом катушки и другим, и вместе три коммутатора и три катушки образуют полную сеть (кольцо).
Две щетки закреплены под углами 0° и 180° для контакта с коммутаторами. Внешний источник постоянного тока подключается к щеткам, и ток течет по пути от щетки к коммутатору, от коммутатора к катушке и от катушки обратно к щетке.
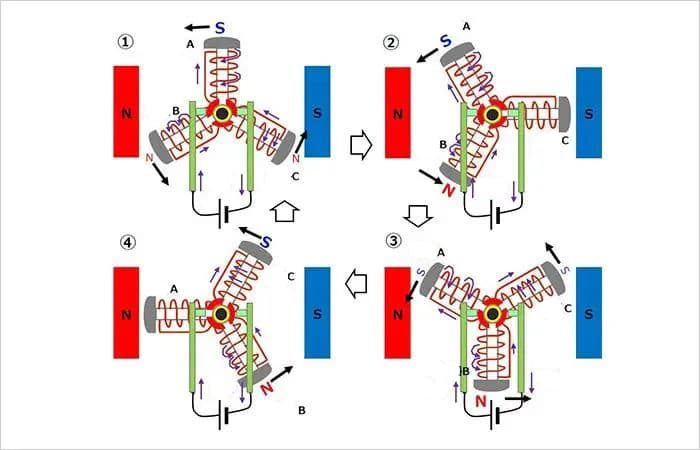
Это принцип вращения щеточного двигателя.
① Вращение против часовой стрелки от начального состояния
Катушка A находится вверху, а источник питания подключен к щеткам, обозначая левую сторону как (+), а правую как (-). Сильный ток течет от левой щетки через коммутатор в катушку А. Это превращает верхнюю (внешнюю) часть катушки А в южный полюс (S).
Поскольку половина тока в катушке A течет от левой щетки к катушкам B и C в направлении, противоположном катушке A, внешние стороны катушек B и C становятся слабыми северными полюсами (N), обозначенными на рисунке меньшими буквами.
Магнитные поля, создаваемые в этих катушках, а также отталкивание и притяжение магнитов создают силу, которая вращает катушки против часовой стрелки.
② Дальнейшее вращение против часовой стрелки
Далее, если предположить, что катушка A повернулась на 30° против часовой стрелки, правая щетка контактирует с двумя коммутаторами.
Ток в катушке A продолжает течь от левой щетки через правую, и внешняя сторона катушки остается южным полюсом. Тот же ток протекает через катушку B, превращая ее внешнюю сторону в более сильный северный полюс. Катушка C замыкается щетками с обоих концов, поэтому ток не течет и магнитное поле не создается.
Даже в этом состоянии прикладывается вращающая сила против часовой стрелки. С ③ до ④ верхняя катушка продолжает двигаться влево, а нижняя - вправо, что приводит к продолжению вращения против часовой стрелки.
При каждом повороте катушки на 30° в состояния ③ и ④, когда катушка находится выше центральной горизонтальной оси, ее внешняя сторона становится южным полюсом; когда она находится ниже, она становится северным полюсом, и это движение повторяется.
Другими словами, на верхнюю катушку постоянно действует сила, направленная влево, а на нижнюю - вправо (обе против часовой стрелки). Таким образом, ротор продолжает вращаться против часовой стрелки.
Если источник питания подключен к противоположным левой (-) и правой (+) щеткам, в катушке создается обратное магнитное поле, что меняет направление силы, приложенной к катушке, и заставляет ее вращаться по часовой стрелке.
Кроме того, при отключении источника питания ротор щеточного двигателя перестает вращаться из-за отсутствия магнитного поля, которое приводило его во вращение.
Трехфазный полноволновый бесщеточный двигатель
Внешний вид и структура трехфазного полноволнового бесщеточного двигателя
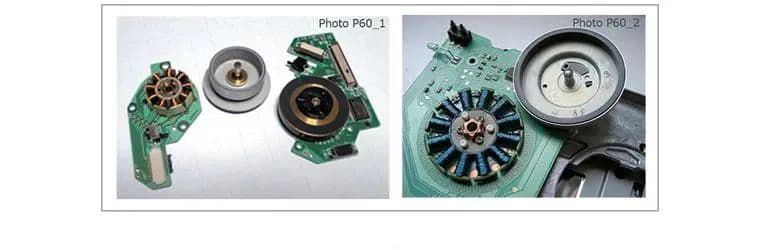
На рисунке ниже показан пример внешнего вида и структуры бесщеточного двигателя.
Пример внешнего вида и конструкции бесщеточного двигателя
Слева показан пример главного шпиндельного двигателя, используемого для вращения диска в устройстве воспроизведения дисков, содержащего в общей сложности девять катушек, три фазы по три раза.
Справа - пример главного шпиндельного двигателя устройства FDD с двенадцатью катушками (три фазы умножить на четыре). Катушки смонтированы на печатной плате и намотаны на железный сердечник.
С правой стороны катушки находится дискообразный компонент - ротор с постоянным магнитом. По периметру находится постоянный магнит, вал ротора вставлен в центр катушки и охватывает часть катушки, а постоянный магнит окружает периферию катушки.
Внутренняя структурная схема и эквивалентная цепь трехфазного полноволнового бесщеточного двигателя
Далее приведены упрощенная схема внутренней структуры и эквивалентная схема соединения катушек для трехфазного полноволнового бесщеточного двигателя.
Эта схема представляет собой простую конструкцию двухполюсного (2 магнита) трехщелевого (3 катушки) двигателя. Она напоминает структуру щеточного двигателя с равным количеством полюсов и слотов, за исключением того, что катушки неподвижны, а магниты вращаются. Естественно, в этой конструкции нет щеток.
В этой конфигурации катушки соединены в форме буквы Y. Полупроводниковые компоненты подают ток на катушки, контролируя приток и отток тока в зависимости от положения вращающихся магнитов.
В этом примере для определения положения магнитов используется элемент Холла. Элемент Холла помещается между катушками, где он определяет напряжение, генерируемое напряженностью магнитного поля, и использует его для получения информации о положении.
На представленном ранее изображении шпиндельного двигателя FDD также можно заметить элемент Холла (расположенный над катушками), который служит для определения положения между катушками.
Элемент Холла - это хорошо известный магнитный датчик. Он может преобразовывать величину магнитного поля в напряжение, отображая направление поля положительными или отрицательными значениями. Ниже приведена схема, иллюстрирующая эффект Холла.
Элемент Холла использует явление, что "когда ток IH течет через полупроводник, а магнитный поток B проходит под прямым углом к току, возникает напряжение VH в направлении, перпендикулярном току и магнитному полю".
Это явление, известное как "эффект Холла", было открыто американским физиком Эдвином Гербертом Холлом. Генерируемое напряжение VH представлено следующей формулой.
VH=(KH/d)・IH・B
Где KH - коэффициент Холла, а d - толщина поверхности, пронизываемой потоком.
Как следует из формулы, чем больше ток, тем выше напряжение. Эта характеристика часто используется для определения положения ротора (магнита).
Принцип вращения трехфазного полноволнового бесщеточного двигателя
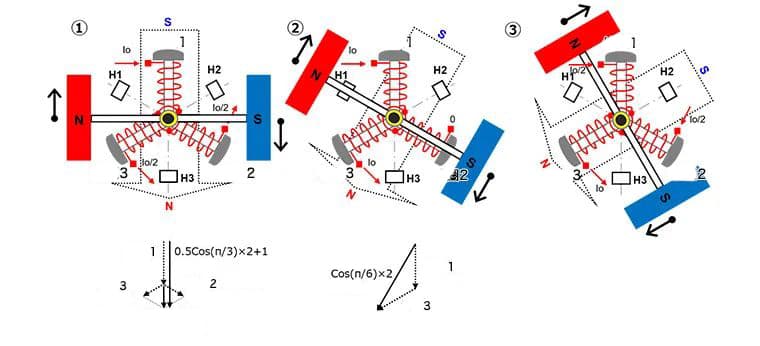
Принцип вращения бесщеточного двигателя будет объяснен в шагах ① - ⑥. Для простоты понимания постоянный магнит был упрощен от круга до прямоугольника.
1) В трехфазной системе катушек представьте, что катушка 1 закреплена в положении "12 часов" на часах, катушка 2 - в положении "4 часа", а катушка 3 - в положении "8 часов". Предположим, что двухполюсный постоянный магнит с северным полюсом слева и южным полюсом справа способен вращаться.
Ток Io поступает в катушку 1, создавая магнитное поле южного полюса на внешней стороне катушки. Половина этого тока, Io/2, вытекает из катушек 2 и 3, создавая на их внешней стороне магнитное поле северного полюса.
Когда магнитные поля катушек 2 и 3 претерпевают векторный синтез, возникает направленное вниз магнитное поле северного полюса. Это поле вдвое меньше магнитного поля, создаваемого при прохождении тока Io через одну катушку, а при добавлении к полю катушки 1 оно становится в 1,5 раза больше. Это создает синтезированное магнитное поле под углом 90° к постоянному магниту, создавая максимальный крутящий момент и побуждая постоянный магнит вращаться по часовой стрелке.
Поскольку ток в катушке 2 уменьшается, а в катушке 3 увеличивается в зависимости от положения вращения, синтезированное магнитное поле также вращается по часовой стрелке, продолжая вращение постоянного магнита.
2) При повороте на 30° ток Io входит в катушку 1, устанавливая ток в катушке 2 на нулевое значение и заставляя ток Io вытекать из катушки 3.
Внешняя сторона катушки 1 становится полюсом S, а внешняя сторона катушки 3 превращается в полюс N. При совмещении векторов генерируемое магнитное поле в √3 (примерно 1,72) раза больше, чем у одиночной катушки с током Io. Это также приводит к тому, что составное магнитное поле под углом 90° к полю постоянного магнита вращается по часовой стрелке.
Когда ток притока Io в катушке 1 уменьшается в соответствии с положением вращения, ток притока в катушке 2 начинает увеличиваться от нуля, а ток оттока в катушке 3 увеличивается до Io, составное магнитное поле также вращается по часовой стрелке, и постоянный магнит продолжает вращаться.
Если предположить, что все фазные токи синусоидальны, то ток здесь равен Io×sin(π⁄3)=Io×√3⁄2. Благодаря комбинации векторов магнитного поля общая величина магнитного поля в 1,5 раза превышает поле, создаваемое одной катушкой ((√3⁄2)2×2=1,5). Когда все фазные токи синусоидальны, независимо от положения постоянного магнита, размер векторного комбинированного магнитного поля всегда в 1,5 раза больше, чем у одиночной катушки, и магнитное поле образует угол 90° с магнитным полем постоянного магнита.
3) При дальнейшем повороте на 30° ток Io/2 втекает в катушку 1, ток Io/2 втекает в катушку 2, а ток Io вытекает из катушки 3.
Внешняя сторона катушки 1 становится полюсом S, внешняя сторона катушки 2 также превращается в полюс S, а внешняя сторона катушки 3 становится полюсом N. При совмещении векторов генерируемое магнитное поле в 1,5 раза превышает магнитное поле, создаваемое при прохождении тока Io через одиночную катушку (как и в ①). Здесь также формируется составное магнитное поле под углом 90° к полю постоянного магнита, вращающееся по часовой стрелке.
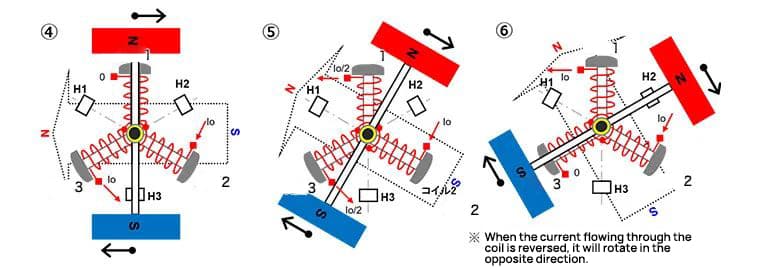
Шаги с 4 по 6, вращайте так же, как шаги с 1 по 3.
Таким образом, при последовательном переключении тока, протекающего в катушке, в зависимости от положения постоянного магнита, постоянный магнит будет вращаться в фиксированном направлении. Аналогично, если изменить направление тока и направление магнитного поля синтетического магнита, он будет вращаться против часовой стрелки.
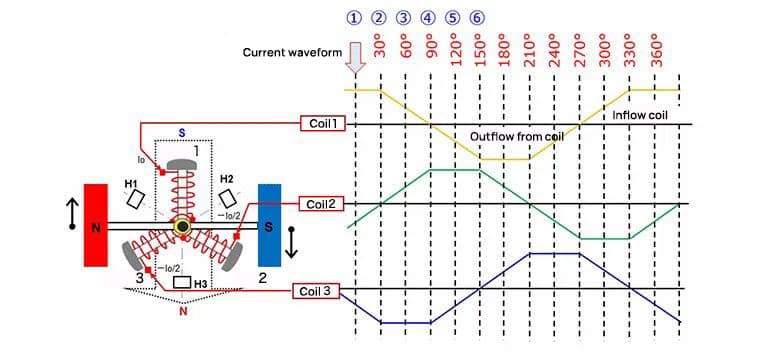
На приведенной ниже диаграмме непрерывно отображается ток для каждой катушки на каждом из вышеупомянутых этапов с 1 по 6. Из приведенного выше введения следует, что взаимосвязь между изменениями тока и вращением должна быть понятна.
Шаговый двигатель
Шаговый двигатель представляет собой тип двигателя который может точно синхронизироваться с импульсными сигналами для управления углами поворота и скоростью. Он также известен как "импульсный двигатель".
Шаговый двигатель, не требующий датчика положения и обеспечивающий точное позиционирование с помощью разомкнутого контура управления, широко используется в оборудовании, требующем точного позиционирования.
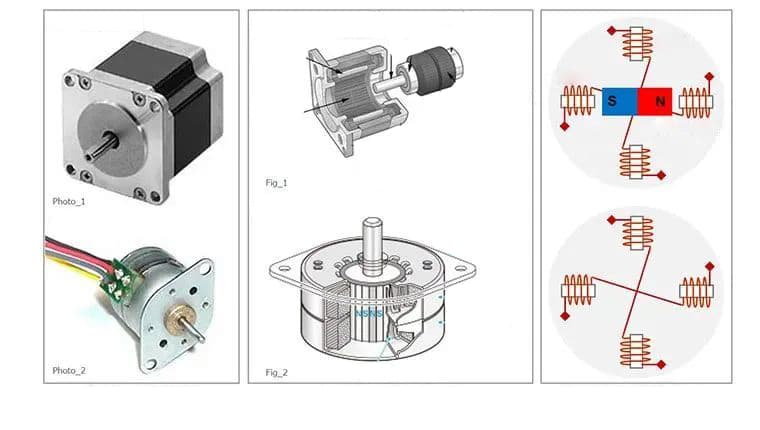
Структура шагового двигателя (двухфазный биполярный)
На изображениях ниже (слева направо) показан пример внешнего вида шагового двигателя, простая схема его внутреннего устройства и концептуальная схема его конструкции.
На внешних примерах представлены шаговые двигатели типов HB (гибридные) и PM (с постоянным магнитом). На средних диаграммах также изображены конструкции типов HB и PM.
Шаговые двигатели имеют неподвижные катушки и вращающийся магнит. Правая концептуальная схема внутренней структуры шагового двигателя иллюстрирует пример двигателя с ПМ, использующего две фазы (два набора) катушек. В базовых примерах структуры шаговых двигателей катушки расположены снаружи, а постоянный магнит - внутри. Помимо двухфазных, существуют также типы с большим количеством фаз, например трехфазные и пятифазные.
Некоторые шаговые двигатели имеют различную структуру, но для объяснения принципов их работы в этой статье приведена основная структура шаговых двигателей. Из этой статьи вы поймете, что шаговые двигатели в основном имеют структуру с фиксированными катушками и вращающимся постоянным магнитом.
Основной принцип работы шаговых двигателей (однофазное возбуждение)
Для объяснения основного принципа работы шаговых двигателей используется следующая схема. Это пример однофазного (один набор катушек) возбуждения вышеупомянутых двухфазных биполярных катушек. Предпосылкой диаграммы является изменение состояния с ① на ④. Катушки состоят из катушки 1 и катушки 2. Кроме того, стрелка тока обозначает направление его протекания.
① Направьте ток на вход с левой стороны катушки 1 и на выход с правой стороны. Не допускайте протекания тока через катушку 2. В результате внутренняя сторона левой катушки 1 становится N (северной), а внутренняя сторона правой катушки 1 становится S (южной). Следовательно, постоянный магнит в центре притягивается магнитным полем катушки 1, принимает состояние S слева и N справа и останавливается.
② Далее остановите ток в катушке 1, направив его на вход сверху катушки 2 и выход снизу. Внутренняя сторона верхней катушки 2 становится N, а внутренняя сторона нижней катушки 2 становится S. Постоянный магнит притягивается этим магнитным полем, поворачивается на 90 градусов по часовой стрелке и останавливается.
После этого остановите ток в катушке 2, направив его на вход с правой стороны катушки 1 и выход с левой стороны. Внутренняя сторона левой катушки 1 становится S, а внутренняя сторона правой катушки 1 становится N. Постоянный магнит снова притягивается этим полем, поворачивается еще на 90 градусов по часовой стрелке и останавливается.
Наконец, остановите ток в катушке 1, направив его на вход снизу катушки 2 и выход сверху. Внутренняя сторона верхней катушки 2 становится S, а внутренняя сторона нижней катушки 2 становится N. Снова постоянный магнит притягивается этим магнитным полем, поворачивается на 90 градусов по часовой стрелке и останавливается.
Переключая ток через катушки в указанной выше последовательности (от ① до ④) с помощью электронной схемы, можно заставить шаговый двигатель вращаться. В этом примере каждое действие переключателя поворачивает шаговый двигатель на 90 градусов.
Кроме того, непрерывное протекание тока через определенную катушку позволяет двигателю оставаться в остановленном состоянии, сохраняя при этом крутящий момент. Кстати, изменение порядка прохождения тока через катушки может заставить шаговый двигатель вращаться в противоположном направлении.
Не забывайте, что делиться - значит заботиться! : )
Поделиться
Facebook
Twitter
LinkedIn
Reddit
VK
Электронная почта
Печать
Автор
Шейн
Основатель MachineMFG
Как основатель MachineMFG, я посвятил более десяти лет своей карьеры металлообрабатывающей промышленности. Мой обширный опыт позволил мне стать экспертом в области производства листового металла, механической обработки, машиностроения и станков для обработки металлов. Я постоянно думаю, читаю и пишу об этих предметах, постоянно стремясь оставаться на переднем крае своей области. Позвольте моим знаниям и опыту стать преимуществом для вашего бизнеса.
Основные концепции автоматизированного проектирования и автоматизированного производства Автоматизированное проектирование и автоматизированное производство (CAD/CAM) - это комплексная и технически сложная дисциплина системного инжиниринга, которая включает в себя такие различные области, как компьютерная [...]...
Концепция виртуального производства Виртуальное производство (ВП) - это фундаментальная реализация реального производственного процесса на компьютере. В нем используются технологии компьютерного моделирования и виртуальной реальности, поддерживаемые высокопроизводительными [...]...
Гибкая производственная система (FMS) обычно использует принципы системной инженерии и групповой технологии. Она объединяет станки с числовым программным управлением (ЧПУ) (обрабатывающие центры), координатно-измерительные машины, системы транспортировки материалов, [...]...
Подобно тому, как производственные технологии играют важнейшую роль в различных областях, технология нанофабрикации занимает ключевое место в сфере нанотехнологий. Технология нанофабрикации включает в себя множество методов, в том числе механические [...].
Сверхточная обработка относится к прецизионным производственным процессам, в которых достигаются чрезвычайно высокие уровни точности и качества поверхности. Ее определение относительно и меняется по мере развития технологий. В настоящее время эта технология позволяет достичь [...].
В настоящее время механическую обработку можно разделить на две группы в зависимости от серийности производства: Среди этих двух категорий, первая составляет около 70-80% от общей стоимости продукции механической обработки [...]...
В этой статье в основном представлены несколько зрелых методов специальной обработки. I. Обработка электрическим разрядом (EDM) EDM - это метод обработки токопроводящих материалов, использующий явление электрической коррозии во время [...]...
Что такое обработка с ЧПУ? Числовое программное управление (ЧПУ) - это метод управления движением и операциями обработки на станках с помощью оцифрованной информации. Станки с числовым программным управлением, часто сокращенно называемые [...]...
Обработка резанием остается наиболее распространенным методом механической обработки, играющим важную роль в механическом производстве. С развитием производственных технологий технология обработки резанием претерпела значительный прогресс в [...].
1. Что такое сварочное напряжение Под сварочным напряжением понимается напряжение, возникающее в процессе сварки в сварных деталях. Это напряжение возникает в результате термического процесса сварки и [...].
Под передовыми материалами понимаются недавно исследованные или находящиеся в стадии разработки материалы, обладающие исключительными характеристиками и особыми функциональными свойствами. Эти материалы имеют огромное значение для развития науки и техники, [...]...
Формирование выпуклости подходит для различных типов заготовок, таких как чашки глубокой вытяжки, разрезанные трубы и прокатные конические сварные изделия. Классификация по средствам формования выпуклости Методы формования выпуклости можно разделить [...].