Nahezu die Hälfte des weltweiten Stromverbrauchs entfällt auf Elektromotoren, weshalb die Verbesserung ihrer Effizienz als wirksamste Maßnahme zur Lösung globaler Energieprobleme gilt.
Typen von Motoren
Im Allgemeinen wandeln Motoren die Kraft, die durch den Stromfluss in einem Magnetfeld erzeugt wird, in eine Drehbewegung um, aber im Großen und Ganzen umfasst dies auch lineare Bewegungen.
Je nach Art der Stromquelle, die den Motor antreibt, werden sie in Gleichstrom- und Wechselstrommotoren unterschieden.
Darüber hinaus können sie nach dem Prinzip der Motordrehung grob in die folgenden Kategorien eingeteilt werden, mit Ausnahme von Spezialmotoren.
1. DC (Gleichstrom) Motoren
(1) Bürstenmotoren
Die weit verbreiteten Bürstenmotoren werden allgemein als Gleichstrommotoren bezeichnet. Sie drehen sich, indem sie nacheinander die "Bürsten" genannten Elektroden (auf der Statorseite) und den "Kommutator" (auf der Ankerseite) kontaktieren, um den Strom zu schalten.
(2) Bürstenlose DC-Motoren
Bürstenlose Gleichstrommotoren benötigen keine Bürsten und Kommutatoren. Sie verwenden Schaltfunktionen wie Transistoren, um den Strom zu schalten und eine Drehbewegung zu erzielen.
(3) Schrittmotoren
Dieser Motor arbeitet im Gleichlauf mit der Impulsleistung und wird daher auch als Impulsmotor bezeichnet. Sein Merkmal ist die Fähigkeit, auf einfache Weise eine genaue Positionierung zu erreichen.
2. AC-Motoren (Wechselstrom)
(1) Asynchrone Motoren
Der Wechselstrom erzeugt im Stator ein rotierendes Magnetfeld, das den Rotor dazu veranlasst, Strom zu induzieren und sich unter dessen Einwirkung zu drehen.
(2) Synchrone Motoren
Der Wechselstrom erzeugt ein rotierendes Magnetfeld, und der Rotor mit den Magnetpolen dreht sich aufgrund der Anziehung. Die Drehgeschwindigkeit ist mit der Netzfrequenz synchronisiert.
Schrittmotor
Gebürsteter Gleichstrommotor
Bürstenloser Gleichstrommotor
Strom, magnetische Felder und Kraft
Zur Erleichterung der nachfolgenden Erklärungen zu den motorischen Prinzipien wollen wir zunächst die grundlegenden Gesetze/Regeln zu Strom, Magnetfeldern und Kraft wieder aufgreifen.
Auch wenn es ein Gefühl der Nostalgie hervorruft, kann dieses Wissen leicht in Vergessenheit geraten, wenn magnetische Bauteile nicht regelmäßig verwendet werden.
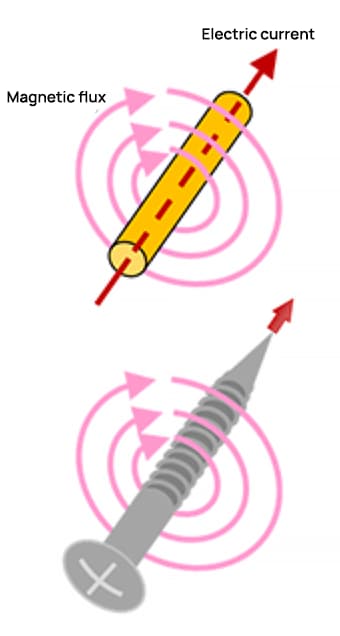
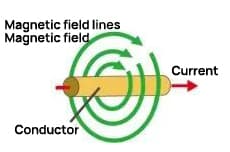
Ampere'sches Gesetz (Rechte-Schrauben-Regel)
Der magnetische Fluss, der durch einen Strom in einer Spule erzeugt wird
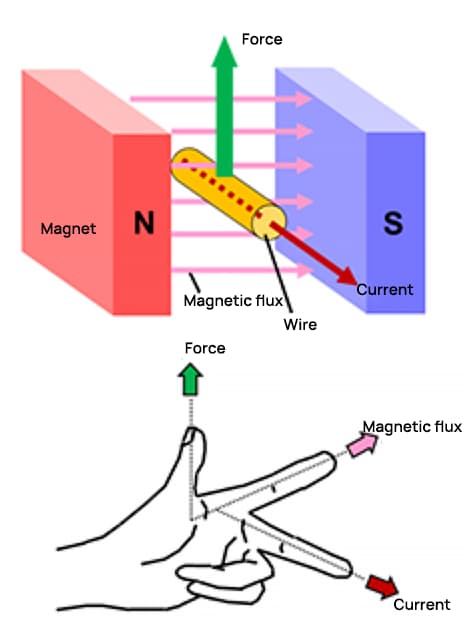
Basierend auf Flemings Linke-Hand-Regel
Wir werden dies anhand von Bildern und Gleichungen veranschaulichen.
Schematische Darstellung der Motordrehung
Wenn der Drahtrahmen rechteckig ist, muss die auf den Strom wirkende Kraft berücksichtigt werden. Die Kraft F, die auf die Teile a und c des Rahmens ausgeübt wird, beträgt:
Das Drehmoment wird um die Mittelachse erzeugt. Betrachtet man beispielsweise einen Zustand, in dem der Drehwinkel nur θ beträgt, so ist die im rechten Winkel zu b und d wirkende Kraft sinθ. Folglich wird das Drehmoment Ta in Teil a durch die folgende Formel dargestellt:
Wenn man Teil C auf die gleiche Weise betrachtet, verdoppelt sich das Drehmoment und erzeugt ein Drehmoment, das nach der folgenden Formel berechnet wird:
Da der Flächeninhalt eines Rechtecks S = h*l ist, lässt sich durch Einsetzen in die oben genannte Formel folgendes Ergebnis ableiten:
Diese Formel gilt nicht nur für Rechtecke, sondern auch für andere gängige Formen wie Kreise. Dieses Prinzip liegt dem Betrieb von Elektromotoren zugrunde.
Wie dreht sich ein Motor?
1) Motoren drehen sich mit Hilfe von Magneten und Magnetkraft.
Um einen Permanentmagneten mit einer rotierenden Welle:
① Drehen Sie den Magneten (um ein rotierendes Magnetfeld zu erzeugen).
② Dies folgt dem Prinzip, dass sich entgegengesetzte Pole (N und S) anziehen, während sich gleiche Pole abstoßen.
③ Der Magnet mit der rotierenden Welle wird sich dann drehen.
Dies ist das Grundprinzip der Motordrehung.
Der Strom, der durch den Leiter fließt, erzeugt ein rotierendes Magnetfeld um ihn herum, wodurch sich der Magnet dreht, was im Wesentlichen denselben Bewegungszustand darstellt.
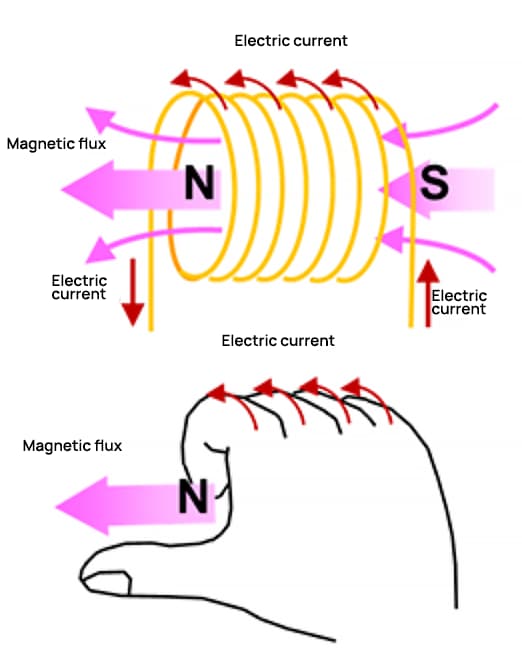
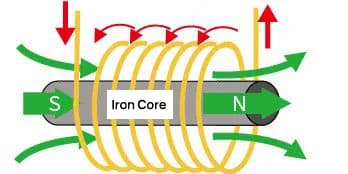
Wenn ein Leiter zu einer Spule gewickelt wird, vereinigen sich die magnetischen Kräfte zu einem großen magnetischen Fluss, der einen Nord- und einen Südpol erzeugt.
Durch das Einsetzen eines Eisenkerns in den gewickelten Leiter können die magnetischen Feldlinien zudem leichter durchdringen, wodurch eine stärkere Magnetkraft erzeugt wird.
2) Betriebsfähige rotierende Motoren
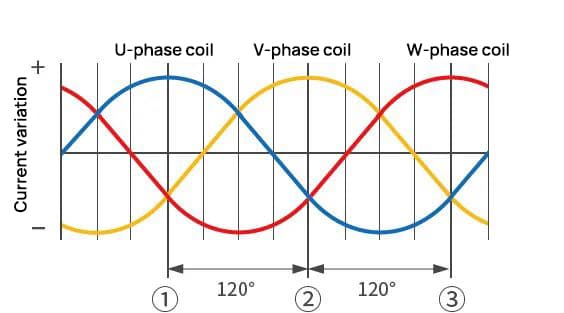
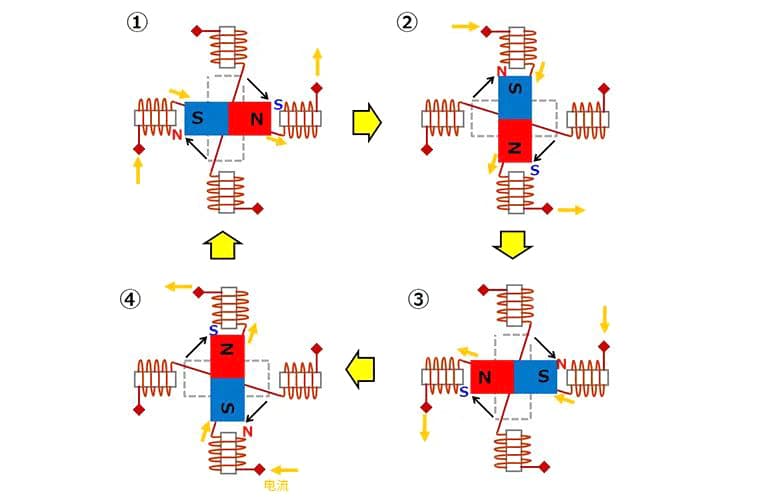
In diesem Zusammenhang stellen wir einen praktischen Ansatz für rotierende Motoren vor, der die Verwendung von Dreiphasen-Wechselstrom und Spulen zur Erzeugung eines rotierenden Magnetfelds demonstriert. (Dreiphasen-Wechselstrom bezieht sich auf Wechselsignale, die in Abständen von 120° phasenverschoben sind).
Das synthetische Magnetfeld im oben genannten Zustand ① entspricht der Abbildung ① unten.
Das synthetische Magnetfeld in dem zuvor erwähnten Zustand ② stimmt mit der nachstehenden Abbildung ② überein.
Das synthetische Magnetfeld, das mit dem oben genannten Zustand ③ verbunden ist, ist in Abbildung ③ unten dargestellt.
Wie bereits erwähnt, ist die um den Eisenkern gewickelte Spule in drei Phasen unterteilt: U-Phasen-Spule, V-Phasen-Spule und W-Phasen-Spule, die im Abstand von 120° angeordnet sind. Die Spule mit der höheren Spannung erzeugt einen Nordpol, während die Spule mit der niedrigeren Spannung einen Südpol erzeugt.
Jede Phase ändert sich entsprechend der Sinuswelle, so dass sich die Polarität (Nord- oder Südpol) und das von jeder Spule erzeugte Magnetfeld (Magnetkraft) ändern.
Betrachtet man an dieser Stelle nur die Spule, die den Nordpol erzeugt, so geht die Abfolge der Änderungen von der U-Phasen-Spule zur V-Phasen-Spule, dann zur W-Phasen-Spule und schließlich zurück zur U-Phasen-Spule, wodurch eine Drehung entsteht.
Aufbau von Kleinmotoren
Die folgende Abbildung zeigt den allgemeinen Aufbau und den Vergleich von drei Motortypen: Schrittmotoren, bürstenbehaftete Gleichstrommotoren und bürstenlose Gleichstrommotoren.
Zu den Grundbestandteilen dieser Motoren gehören hauptsächlich Spulen, Magnete und Rotoren. Aufgrund ihrer unterschiedlichen Bauarten werden sie weiter in spulenfeste und magnetfeste Typen unterteilt.
Schrittmotor
Gebürsteter Gleichstrommotor
Bürstenloser Gleichstrommotor
Nachfolgend finden Sie eine Strukturbeschreibung, die sich auf das Beispieldiagramm bezieht. Bitte haben Sie Verständnis dafür, dass dieses Dokument die Struktur in einem breiten Rahmen vorstellt, da es weitere Strukturen geben kann, wenn sie detaillierter aufgeteilt werden.
Die Spulen des Schrittmotors sind auf der Außenseite fixiert, während die Magnete auf der Innenseite rotieren; die Magnete des bürstenbehafteten Gleichstrommotors sind auf der Außenseite fixiert, während die Spulen auf der Innenseite rotieren.
Die Stromzufuhr zu den Spulen und die Änderung der Stromrichtung erfolgen über Bürsten und Kommutatoren; bei bürstenlosen Motoren sind die Spulen auf der Außenseite fixiert, während die Magnete auf der Innenseite rotieren.
Aufgrund der unterschiedlichen Motortypen können sich die Strukturen auch bei gleichen Grundkomponenten unterscheiden. Spezifische Details werden in jedem Abschnitt erläutert.
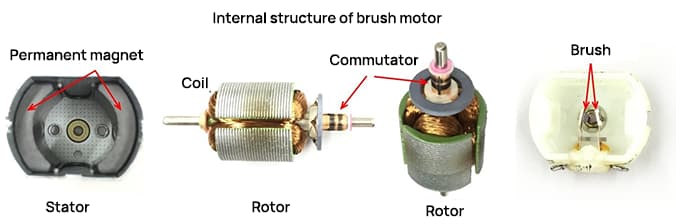
Bürstenmotor
Aufbau eines Bürstenmotors
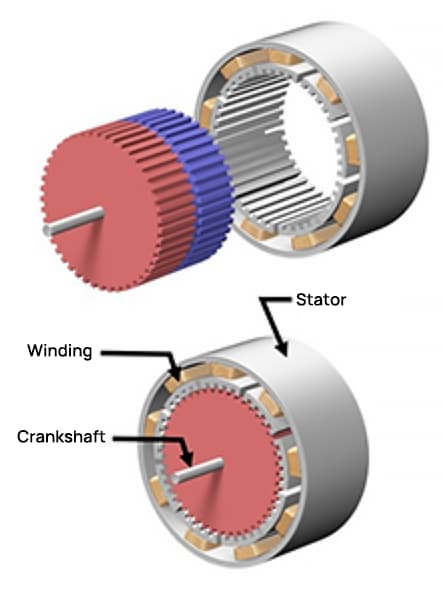
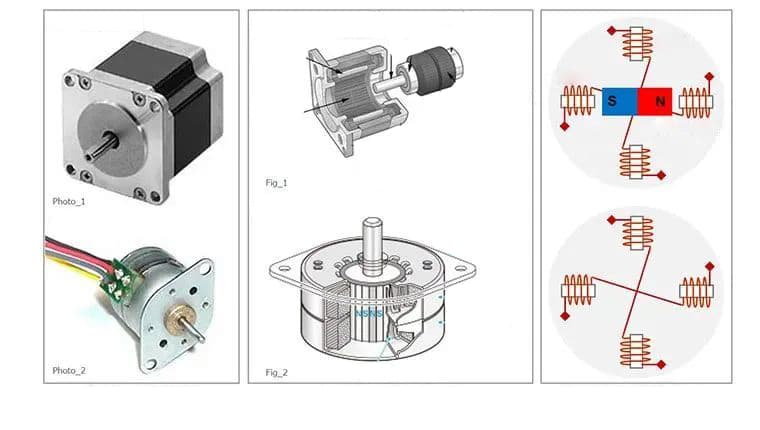
Das Bild unten zeigt das Äußere eines bürstenbehafteten Gleichstrommotors, der häufig in Modellen verwendet wird, sowie eine Explosionszeichnung eines typischen zweipoligen (zwei Magnete) und dreischlitzigen (drei Spulen) Motors. Viele haben vielleicht Erfahrung mit der Demontage von Motoren und dem Entfernen von Magneten.
Bei einem bürstenbehafteten Gleichstrommotor sind die Dauermagnete feststehend, während sich die Spulen um den inneren Mittelpunkt drehen können. Die stationäre Seite wird als "Stator" und die rotierende Seite als "Rotor" bezeichnet.
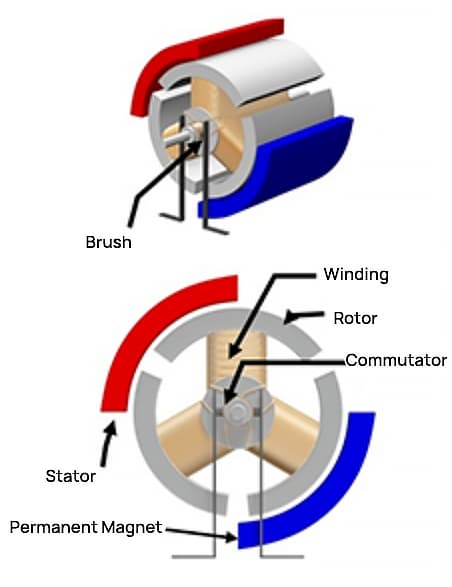
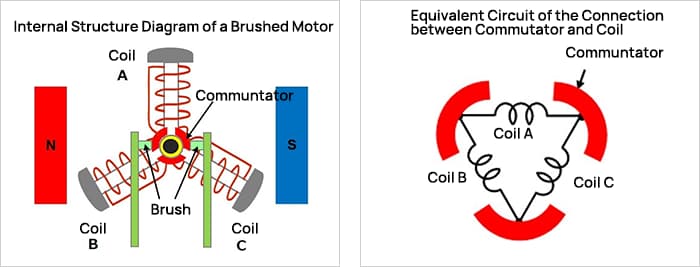
Die folgende schematische Darstellung veranschaulicht die strukturellen Konzepte.
Die zentrale Drehachse ist von drei Kommutatoren umgeben, gebogenen Metallplatten, die zum Schalten des elektrischen Stroms verwendet werden. Um eine gegenseitige Berührung zu vermeiden, sind die Kommutatoren in einem Abstand von 120° (360° ÷ 3 Einheiten) angeordnet. Diese Kommutatoren drehen sich mit der Achse.
Jeder Kommutator ist mit einem Ende einer Spule und einem anderen verbunden, und zusammen bilden die drei Kommutatoren und drei Spulen ein komplettes Schaltnetz (Ring).
Zwei Bürsten sind in einem Winkel von 0° und 180° angebracht, um mit den Kommutatoren in Kontakt zu kommen. Eine externe Gleichstromquelle ist an die Bürsten angeschlossen, und der Strom fließt auf dem Weg von der Bürste zum Kommutator, vom Kommutator zur Spule und von der Spule zurück zur Bürste.
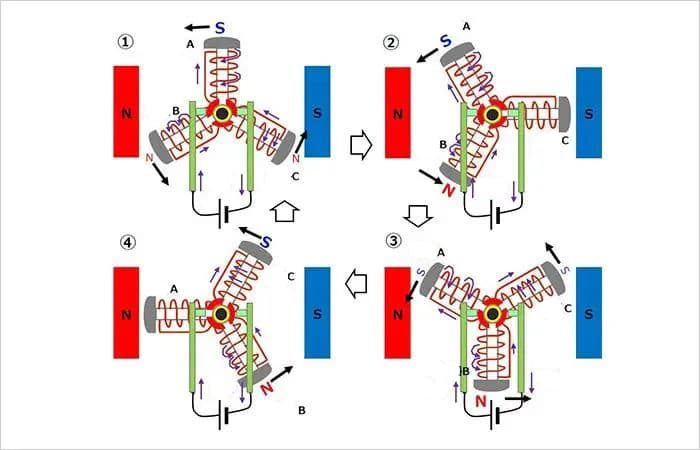
Dies ist das Rotationsprinzip für einen Bürstenmotor.
① Drehung gegen den Uhrzeigersinn aus dem Ausgangszustand
Spule A befindet sich oben, die Stromquelle ist mit den Bürsten verbunden, wobei die linke Seite als (+) und die rechte als (-) bezeichnet wird. Ein hoher Strom fließt von der linken Bürste durch den Kommutator in die Spule A. Dadurch wird der obere (äußere) Teil der Spule A zu einem Südpol (S).
Da die Hälfte des Stroms der Spule A von der linken Bürste zu den Spulen B und C in entgegengesetzter Richtung zu Spule A fließt, werden die Außenseiten der Spulen B und C zu schwachen Nordpolen (N), die im Diagramm durch kleinere Buchstaben gekennzeichnet sind.
Die in diesen Spulen erzeugten Magnetfelder sorgen zusammen mit der Abstoßung und Anziehung der Magnete für eine Kraft, die die Spulen gegen den Uhrzeigersinn dreht.
② Weitere Drehung gegen den Uhrzeigersinn
Angenommen, die Spule A hat sich um 30° gegen den Uhrzeigersinn gedreht, dann berührt die rechte Bürste die beiden Kommutatoren.
Der Strom in Spule A fließt weiterhin von der linken Bürste über die rechte Bürste, und die Außenseite der Spule bleibt ein Südpol. Derselbe Strom fließt durch die Spule B und verwandelt ihre Außenseite in einen stärkeren Nordpol. Die Spule C wird durch die Bürsten an beiden Enden kurzgeschlossen, so dass kein Strom fließt und kein Magnetfeld erzeugt wird.
Auch in diesem Zustand wird eine gegen den Uhrzeigersinn drehende Kraft ausgeübt. Von ③ bis ④ wird die obere Spule weiter nach links und die untere Spule weiter nach rechts getrieben, was zu einer fortgesetzten Drehung gegen den Uhrzeigersinn führt.
Bei jeder Drehung der Spule um 30° in die Zustände ③ und ④ wird die Außenseite der Spule, wenn sie sich oberhalb der horizontalen Mittelachse befindet, zum Südpol, wenn sie sich unterhalb befindet, wird sie zum Nordpol, und diese Bewegung wiederholt sich.
Mit anderen Worten, die obere Spule erfährt wiederholt eine Kraft nach links und die untere Spule eine Kraft nach rechts (beide gegen den Uhrzeigersinn). Dadurch dreht sich der Rotor weiterhin gegen den Uhrzeigersinn.
Wird die Stromquelle an die gegenüberliegende linke Bürste (-) und rechte Bürste (+) angeschlossen, wird in der Spule ein umgekehrtes Magnetfeld erzeugt, wodurch sich die Richtung der auf die Spule ausgeübten Kraft umkehrt, so dass sie sich im Uhrzeigersinn dreht.
Außerdem hört der Rotor des Bürstenmotors auf, sich zu drehen, wenn die Stromquelle abgeschaltet wird, da das Magnetfeld, das seine Drehung antrieb, nicht mehr vorhanden ist.
Dreiphasiger bürstenloser Vollwellenmotor
Erscheinungsbild und Struktur eines dreiphasigen bürstenlosen Vollwellenmotors
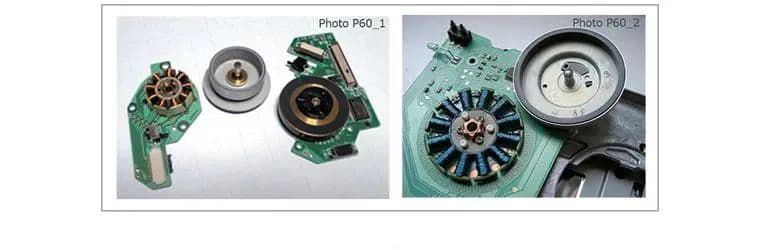
Die folgende Abbildung zeigt ein Beispiel für das Aussehen und die Struktur des bürstenlosen Motors.
Beispiel für Aussehen und Aufbau eines bürstenlosen Motors
Die linke Seite zeigt ein Beispiel des Hauptspindelmotors, der zum Drehen der Disc im Disc-Abspielgerät verwendet wird und insgesamt neun Spulen, drei mal drei Phasen, enthält.
Rechts ist ein Beispiel für den Hauptspindelmotor eines FDD-Geräts mit zwölf Spulen (drei mal vier Phasen) zu sehen. Die Spulen sind auf einer Leiterplatte montiert und um einen Eisenkern gewickelt.
Das scheibenförmige Bauteil auf der rechten Seite der Spule ist ein Permanentmagnetrotor. Der Umfang ist ein Permanentmagnet, die Welle des Rotors ist in die Mitte der Spule eingesetzt und bedeckt einen Teil der Spule, wobei der Permanentmagnet den Umfang der Spule umgibt.
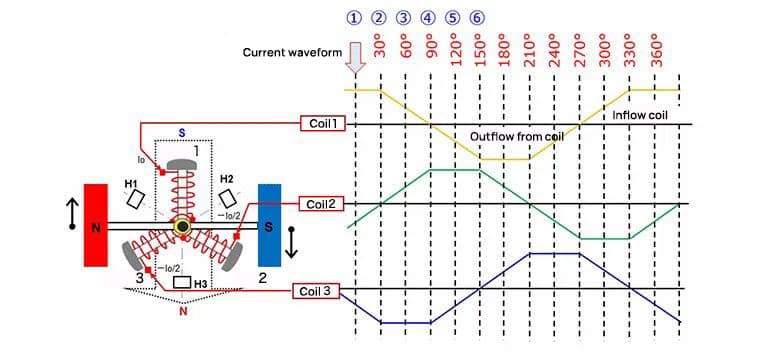
Internes Strukturdiagramm und äquivalente Schaltung eines dreiphasigen bürstenlosen Vollwellenmotors
Es folgen das vereinfachte innere Strukturdiagramm und das Ersatzschaltbild der Spulenanschlüsse für einen dreiphasigen bürstenlosen Vollwellenmotor.
Dieses Schaltbild zeigt einen einfachen Aufbau eines 2-poligen (2 Magnete) 3-Nut-Motors (3 Spulen). Er ähnelt dem Aufbau eines Bürstenmotors mit der gleichen Anzahl von Polen und Nuten, mit dem Unterschied, dass die Spulenseite stationär ist und die Magnete drehbar sind. Natürlich sind bei dieser Konstruktion keine Bürsten vorhanden.
In dieser Konfiguration sind die Spulen Y-förmig verbunden. Halbleiterbauteile versorgen die Spulen mit Strom und steuern den Stromzufluss und -abfluss in Abhängigkeit von der Position der rotierenden Magneten.
In diesem Beispiel wird ein Hall-Element verwendet, um die Position der Magnete zu ermitteln. Das Hall-Element wird zwischen den Spulen platziert, wo es die durch die Magnetfeldstärke erzeugte Spannung erfasst und als Positionsinformation verwendet.
Auf dem zuvor gezeigten Bild des FDD-Spindelmotors ist auch ein Hall-Element (oberhalb der Spulen) zu sehen, das zur Positionsbestimmung zwischen den Spulen dient.
Das Hall-Element ist ein bekannter magnetischer Sensor. Es kann die Größe eines Magnetfeldes in eine Spannung umwandeln, die die Richtung des Feldes mit positiven oder negativen Werten darstellt. Nachstehend finden Sie ein Diagramm, das den Hall-Effekt veranschaulicht.
Das Hall-Element macht sich das Phänomen zunutze, dass "wenn der Strom IH durch den Halbleiter fließt und der magnetische Fluss B im rechten Winkel zum Strom verläuft, eine Spannung VH in der Richtung senkrecht zum Strom und zum Magnetfeld erzeugt wird".
Dieses Phänomen, das als "Hall-Effekt" bekannt ist, wurde von dem amerikanischen Physiker Edwin Herbert Hall entdeckt. Die erzeugte Spannung VH wird durch die folgende Formel dargestellt.
VH=(KH/d)・IH・B
Dabei ist KH der Hall-Koeffizient und d die Dicke der flussdurchdringenden Oberfläche.
Die Formel besagt: Je größer der Strom, desto höher die Spannung. Diese Eigenschaft wird oft genutzt, um die Position des Rotors (Magneten) zu erkennen.
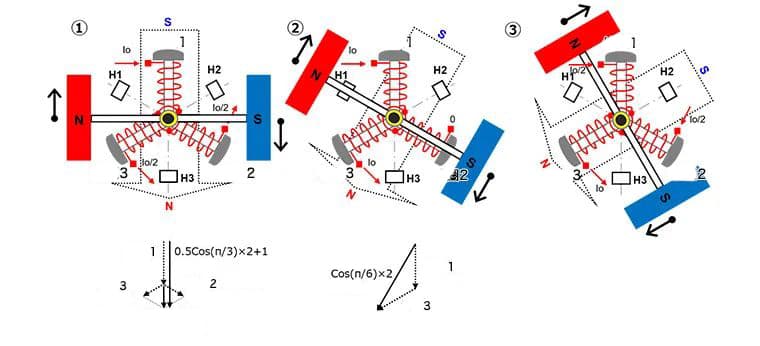
Das Rotationsprinzip des bürstenlosen Motors wird in den Schritten ① bis ⑥ erklärt. Zum besseren Verständnis wurde der Permanentmagnet von einem Kreis zu einem Rechteck vereinfacht.
1) Stellen Sie sich in einem dreiphasigen Spulensystem die Spule 1 auf der 12-Uhr-Position einer Uhr, die Spule 2 auf der 4-Uhr-Position und die Spule 3 auf der 8-Uhr-Position vor. Nehmen Sie einen 2-poligen Dauermagneten an, dessen Nordpol auf der linken und dessen Südpol auf der rechten Seite liegt und der sich drehen kann.
Der Strom Io wird in die Spule 1 eingespeist und erzeugt ein Südpol-Magnetfeld an der Außenseite der Spule. Die Hälfte dieses Stroms, Io/2, fließt aus den Spulen 2 und 3 heraus und erzeugt an deren Außenseite ein Nordpol-Magnetfeld.
Wenn die Magnetfelder der Spulen 2 und 3 eine Vektorsynthese durchlaufen, entsteht ein nach unten gerichtetes Nordpol-Magnetfeld. Dieses Feld ist halb so groß wie das Magnetfeld, das erzeugt wird, wenn der Strom Io durch eine Spule fließt, und wird, wenn es zum Feld von Spule 1 addiert wird, 1,5 mal größer. Auf diese Weise entsteht ein synthetisches Magnetfeld im 90°-Winkel zum Dauermagneten, wodurch ein maximales Drehmoment erzeugt und eine Drehung des Dauermagneten im Uhrzeigersinn veranlasst wird.
Da der Strom in Spule 2 abnimmt und der in Spule 3 je nach Drehposition zunimmt, dreht sich das synthetische Magnetfeld ebenfalls im Uhrzeigersinn und setzt die Drehung des Permanentmagneten fort.
2) Bei einer Drehung um 30° fließt der Strom Io in Spule 1, wodurch der Strom in Spule 2 auf Null gesetzt wird und der Strom Io aus Spule 3 fließt.
Die Außenseite von Spule 1 wird zum S-Pol, und die Außenseite von Spule 3 wird zum N-Pol. Während der Vektorkombination ist das erzeugte Magnetfeld √3 (ungefähr 1,72) mal so groß wie das einer einzelnen Spule, die den Strom Io führt. Daraus ergibt sich auch ein zusammengesetztes Magnetfeld, das im 90°-Winkel zum Feld des Permanentmagneten steht und sich im Uhrzeigersinn dreht.
Wenn der Zuflussstrom Io in Spule 1 entsprechend der Drehposition verringert wird, beginnt der Zuflussstrom in Spule 2 von Null an zu steigen, und der Abflussstrom in Spule 3 steigt auf Io, das zusammengesetzte Magnetfeld dreht sich ebenfalls im Uhrzeigersinn, und der Permanentmagnet dreht sich weiter.
Unter der Annahme, dass alle Phasenströme sinusförmig sind, beträgt der Strom hier Io×sin(π⁄3)=Io×√3⁄2. Durch die Vektorkombination des Magnetfelds beträgt die Gesamtgröße des Magnetfelds das 1,5-fache des von einer einzelnen Spule erzeugten Felds ((√3⁄2)2×2=1,5). Wenn alle Phasenströme sinusförmig sind, ist die Größe des vektoriell zusammengesetzten Magnetfeldes unabhängig von der Position des Permanentmagneten immer 1,5 mal so groß wie die einer einzelnen Spule, und das Magnetfeld bildet einen 90°-Winkel mit dem Magnetfeld des Permanentmagneten.
3) Bei einer weiteren Drehung um 30° fließt der Strom Io/2 in die Spule 1, der Strom Io/2 in die Spule 2 und der Strom Io fließt aus der Spule 3.
Die Außenseite von Spule 1 wird zum S-Pol, die Außenseite von Spule 2 wird ebenfalls zum S-Pol, und die Außenseite von Spule 3 wird zum N-Pol. Bei der Vektorkombination ist das erzeugte Magnetfeld das 1,5-fache des Magnetfeldes, das entsteht, wenn der Strom Io durch eine einzelne Spule fließt (wie bei ①). Auch hier entsteht ein zusammengesetztes Magnetfeld, das im 90°-Winkel zum Feld des Permanentmagneten steht und sich im Uhrzeigersinn dreht.
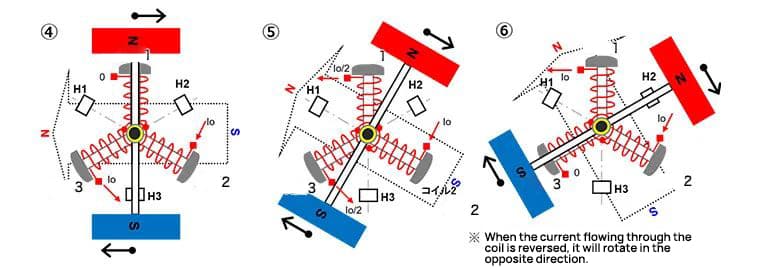
Die Schritte 4 bis 6 werden auf die gleiche Weise wie die Schritte 1 bis 3 durchgeführt.
Indem man den in die Spule fließenden Strom entsprechend der Position des Dauermagneten sequentiell umschaltet, dreht sich der Dauermagnet in einer festen Richtung. Wenn der Strom umgekehrt wird und die Richtung des synthetischen Magnetfelds umgekehrt wird, dreht er sich gegen den Uhrzeigersinn.
Das nachstehende Diagramm zeigt fortlaufend den Strom für jede Spule in jedem der vorgenannten Schritte 1 bis 6. Nach der obigen Einführung sollte die Beziehung zwischen den Änderungen des Stroms und der Drehung verstanden werden.
Schrittmotor
Der Schrittmotor ist ein Motortyp der sich genau mit Impulssignalen synchronisieren kann, um Drehwinkel und Geschwindigkeit zu steuern. Er wird auch als "Impulsmotor" bezeichnet.
Der Schrittmotor, der keinen Positionssensor benötigt und eine genaue Positionierung über einen offenen Regelkreis erreichen kann, wird häufig in Geräten eingesetzt, die eine genaue Positionierung erfordern.
Aufbau eines Schrittmotors (zweiphasig bipolar)
Die folgenden Abbildungen (von links nach rechts) zeigen ein Beispiel für das äußere Erscheinungsbild eines Schrittmotors, ein einfaches Diagramm seines inneren Aufbaus und ein konzeptionelles Schema seines Aufbaus.
Die äußeren Beispiele beziehen sich auf Schrittmotoren des Typs HB (Hybrid) und PM (Permanentmagnet). In den mittleren Diagrammen sind auch die Strukturen der HB- und PM-Typen dargestellt.
Schrittmotoren sind mit festen Spulen und einem rotierenden Magneten aufgebaut. Das Konzeptdiagramm des internen Aufbaus des Schrittmotors auf der rechten Seite zeigt ein Beispiel für einen PM-Motor mit zwei Phasen (zwei Sätze) von Spulen. In den Beispielen für die Grundstruktur der Schrittmotoren sind die Spulen außen angeordnet, und der Dauermagnet befindet sich im Inneren. Neben den zweiphasigen Motoren gibt es auch Typen mit einer höheren Anzahl von Phasen, wie z. B. dreiphasige und fünfphasige Motoren.
Einige Schrittmotoren haben unterschiedliche Strukturen, aber um ihre Funktionsweise zu erklären, wird in diesem Artikel die grundlegende Struktur von Schrittmotoren beschrieben. Durch diesen Artikel soll verstanden werden, dass Schrittmotoren in erster Linie eine Struktur mit festen Spulen und einem rotierenden Permanentmagneten aufweisen.
Grundlegendes Arbeitsprinzip von Schrittmotoren (einphasige Erregung)
Das folgende Diagramm dient zur Erläuterung des grundlegenden Funktionsprinzips von Schrittmotoren. Es handelt sich um ein einphasiges (ein Spulensatz) Erregungsbeispiel für die oben erwähnten zweiphasigen bipolaren Spulen. Die Prämisse des Diagramms ist der Zustandswechsel von ① zu ④. Die Spulen bestehen aus Spule 1 und Spule 2. Außerdem stellt der Strompfeil die Richtung des Stromflusses dar.
Leiten Sie den Strom von der linken Seite der Spule 1 hinein und von der rechten Seite hinaus. Vermeiden Sie jeglichen Stromfluss durch Spule 2. Infolgedessen wird die Innenseite der linken Spule 1 zu N (Norden), während die Innenseite der rechten Spule 1 zu S (Süden) wird. Folglich wird der Dauermagnet in der Mitte vom Magnetfeld der Spule 1 angezogen, nimmt einen Zustand mit S auf der linken und N auf der rechten Seite an und bleibt stehen.
Als Nächstes stoppen Sie den Strom in Spule 1 und leiten ihn so, dass er von oben in Spule 2 hinein und von unten heraus fließt. Die Innenseite der oberen Spule 2 wird dann zu N, und die Innenseite der unteren Spule 2 wird zu S. Der Dauermagnet wird von diesem Magnetfeld angezogen, dreht sich um 90 Grad im Uhrzeigersinn und hält an.
Danach stoppen Sie den Strom in Spule 2 und leiten ihn von der rechten Seite von Spule 1 hinein und von der linken Seite hinaus. Die Innenseite der linken Spule 1 wird zu S, und die Innenseite der rechten Spule 1 wird zu N. Der Dauermagnet wird von diesem Feld wieder angezogen, dreht sich um weitere 90 Grad im Uhrzeigersinn und hält an.
Schließlich stoppen Sie den Strom in Spule 1 und leiten ihn von unten in Spule 2 hinein und von oben hinaus. Die Innenseite der oberen Spule 2 wird zu S, während die Innenseite der unteren Spule 2 zu N wird. Wieder wird der Permanentmagnet von diesem Magnetfeld angezogen, dreht sich um 90 Grad im Uhrzeigersinn und bleibt stehen.
Durch Umschalten des Stromflusses durch die Spulen in der oben genannten Reihenfolge (① bis ④) über eine elektronische Schaltung kann der Schrittmotor zum Drehen gebracht werden. In diesem Beispiel dreht jeder Schaltvorgang den Schrittmotor um 90 Grad.
Durch die Aufrechterhaltung eines kontinuierlichen Stromflusses durch eine bestimmte Spule kann der Motor im Stillstand verbleiben und das Drehmoment beibehalten. Nebenbei bemerkt kann die Umkehrung der Reihenfolge des Stromflusses durch die Spulen dazu führen, dass sich der Schrittmotor in die entgegengesetzte Richtung dreht.
Als Gründer von MachineMFG habe ich mehr als ein Jahrzehnt meiner Karriere der metallverarbeitenden Industrie gewidmet. Meine umfangreiche Erfahrung hat es mir ermöglicht, ein Experte auf den Gebieten der Blechverarbeitung, der maschinellen Bearbeitung, des Maschinenbaus und der Werkzeugmaschinen für Metalle zu werden. Ich denke, lese und schreibe ständig über diese Themen und bin stets bestrebt, in meinem Bereich an vorderster Front zu bleiben. Lassen Sie mein Wissen und meine Erfahrung zu einem Gewinn für Ihr Unternehmen werden.
Grundlegende Konzepte des computergestützten Entwurfs und der computergestützten Fertigung Der computergestützte Entwurf und die computergestützte Fertigung (CAD/CAM) sind ein umfassendes und technisch komplexes Fachgebiet der Systemtechnik, das verschiedene Bereiche wie die [...]
Konzept der virtuellen Fertigung Die virtuelle Fertigung (VM) ist die grundlegende Umsetzung des tatsächlichen Fertigungsprozesses auf einem Computer. Sie nutzt die Technologien der Computersimulation und der virtuellen Realität, unterstützt durch [...]
Ein flexibles Fertigungssystem (FFS) beruht in der Regel auf den Prinzipien der Systemtechnik und der Gruppentechnologie. Es verbindet CNC-gesteuerte Werkzeugmaschinen (Bearbeitungszentren), Koordinatenmessmaschinen, Materialtransportsysteme, [...]
So wie die Fertigungstechnologie heute in verschiedenen Bereichen eine entscheidende Rolle spielt, nimmt die Nanofabrikationstechnologie eine Schlüsselposition in der Nanotechnologie ein. Die Nanofabrikationstechnologie umfasst zahlreiche Methoden, darunter mechanische [...]
Unter Ultrapräzisionsbearbeitung versteht man Präzisionsfertigungsverfahren, die ein extrem hohes Maß an Genauigkeit und Oberflächenqualität erreichen. Die Definition ist relativ und ändert sich mit den technologischen Fortschritten. Derzeit kann diese Technik [...]
Gegenwärtig kann die spanabhebende Bearbeitung in zwei Gruppen eingeteilt werden, die sich auf die Produktionscharge beziehen: Von diesen beiden Kategorien entfallen auf die erste etwa 70-80% des gesamten Produktionswerts der Zerspanung [...]
In diesem Artikel werden hauptsächlich mehrere ausgereifte spezielle Bearbeitungsmethoden vorgestellt. I. Funkenerosion (EDM) Die Funkenerosion ist ein Verfahren zur Bearbeitung leitfähiger Werkstoffe unter Ausnutzung des Phänomens der elektrischen Korrosion während [...]
Was ist CNC-Bearbeitung? Numerische Steuerung (NC) bezeichnet die Methode zur Steuerung der Bewegung und der Bearbeitungsvorgänge von Werkzeugmaschinen mit Hilfe digitalisierter Informationen. Numerisch gesteuerte Werkzeugmaschinen, oft abgekürzt als [...]
Die spanabhebende Bearbeitung ist nach wie vor die wichtigste Methode der mechanischen Bearbeitung und spielt eine wichtige Rolle in der mechanischen Fertigung. Mit den Fortschritten in der Fertigungstechnik hat die spanende Bearbeitung erhebliche Fortschritte in Richtung [...]
1. Was sind Schweißspannungen Schweißspannungen sind die Spannungen, die während des Schweißprozesses in geschweißten Bauteilen entstehen. Diese Spannung wird durch den thermischen Prozess des Schweißens verursacht und [...]
Als fortschrittliche Werkstoffe werden Materialien bezeichnet, die in jüngster Zeit erforscht wurden oder sich in der Entwicklung befinden und über außergewöhnliche Leistungen und besondere Funktionen verfügen. Diese Materialien sind für den Fortschritt in Wissenschaft und Technik von größter Bedeutung, [...]
Die Wulstumformung eignet sich für verschiedene Arten von Rohlingen, z. B. für tiefgezogene Tassen, geschnittene Rohre und gewalzte konische Schweißteile. Klassifizierung nach dem Medium der Wulstumformung Wulstumformverfahren lassen sich in folgende Kategorien einteilen [...]