Motor paso a paso
Principio de funcionamiento del motor paso a paso
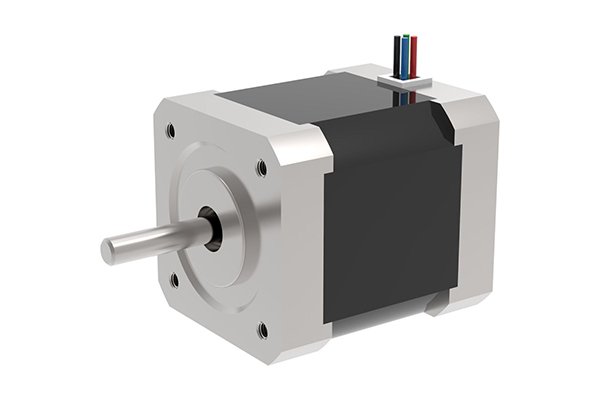
Un motor paso a paso, un tipo de motor diseñado específicamente para el control, convierte los impulsos eléctricos en desplazamiento angular.
Cuando el controlador de pasos recibe una señal de impulso, hace que el motor de pasos gire en un ángulo fijo predeterminado, conocido como "ángulo de paso", en la dirección especificada.
El motor gira paso a paso con el ángulo de paso fijado.
La precisión del posicionamiento se consigue controlando el número de impulsos, y la regulación de la velocidad y la aceleración de la rotación del motor se logra controlando la frecuencia de los impulsos.
La inversión del sentido de giro del motor puede lograrse cambiando la secuencia en la que se energizan los devanados.
Principio de funcionamiento del controlador del motor paso a paso
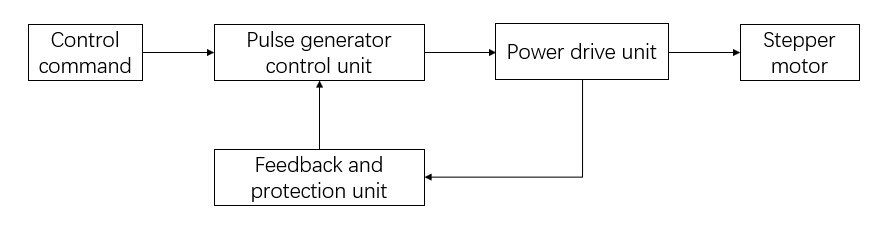
Para funcionar, un motor paso a paso necesita un controlador especializado. Este controlador consta de una unidad de control de impulsos, una unidad de accionamiento de potencia y una unidad de protección.
La unidad de accionamiento de potencia amplifica los impulsos generados por la unidad de control de impulsos y está conectada directamente al motor paso a paso, sirviendo de interfaz de potencia entre el motor paso a paso y el microcontrolador.
La unidad de instrucciones de control recibe señales de impulso y dirección y genera un conjunto de impulsos correspondientes, que se transmiten al motor paso a paso a través de la unidad de accionamiento de potencia.
A continuación, el motor paso a paso gira un ángulo de paso determinado en la dirección indicada.
El motor paso a paso tiene varias especificaciones técnicas clave, como el par estático máximo, frecuencia inicialy la frecuencia de funcionamiento.
Generalmente, cuanto menor es el ángulo de paso, mayor es el par estático máximo y mayores son las frecuencias de arranque y funcionamiento.
Por lo tanto, el modo de funcionamiento hace especial hincapié en la tecnología de accionamiento por subdivisión.
Este método mejora el par y la resolución del motor paso a paso y elimina por completo las oscilaciones de baja frecuencia.
Como resultado, el rendimiento de las unidades de subdivisión es superior al de otros tipos de unidades.
El rotor de un servomotor es un imán permanente. El excitador controla la electricidad trifásica U/V/W para crear un campo electromagnético, haciendo que el rotor gire bajo la influencia de este campo magnético. El propio codificador del motor proporciona señales de realimentación al excitador, que ajusta el ángulo de rotación del rotor basándose en el valor de realimentación y el valor objetivo.
Servomotor
Principio de funcionamiento del servomotor
El servomotor, también denominado motor ejecutivo, se utiliza como actuador en sistemas de control automático para convertir las señales eléctricas recibidas en desplazamiento angular o velocidad angular en el eje del motor.
Existen dos tipos de servomotores: CC y CA.
Cuando un servomotor recibe un impulso, gira el ángulo correspondiente para producir un desplazamiento. Esto se debe a que el propio servomotor emite impulsos, y cada ángulo de giro emite un número correspondiente de impulsos que forman un bucle cerrado con los impulsos recibidos por el servomotor.
Esto permite al sistema controlar el número de impulsos que envía al servomotor y el número de impulsos que recibe, lo que permite un control preciso y un posicionamiento exacto.
En términos de rendimiento, los servomotores de CA son superiores a los de CC. Los servomotores de CA utilizan un control de onda sinusoidal, lo que se traduce en un bajo rizado de par y una alta capacidad.
En cambio, los servomotores de CC utilizan un control de onda trapezoidal y tienen un rendimiento relativamente bajo.
Sin embargo, los servomotores sin escobillas en servomotores de CC funcionan mejor que los servomotores con escobillas.
Principio de funcionamiento del servomotor
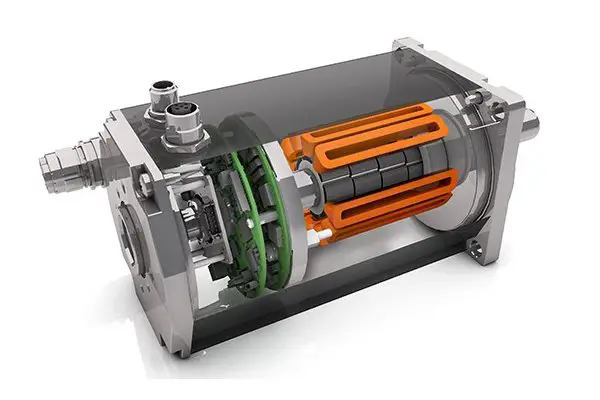
El interior de un servomotor contiene un rotor de imanes permanentes.
El actuador controla la electricidad trifásica U/V/W para generar un campo electromagnético que hace girar el rotor.
Además, el codificador del motor proporciona señales de realimentación al controlador.
El controlador ajusta el ángulo de rotación del rotor basándose en el valor de realimentación y el valor objetivo deseado.
Servomotor de corriente continua con escobillas:
El principio de funcionamiento del motor es similar al de un motor de corriente continua estándar.
El actuador tiene una estructura de tres bucles, formada por un bucle de corriente, un bucle de velocidad y un bucle de posición, dispuestos en orden de dentro a fuera.
La salida del bucle de corriente controla la tensión del inducido del motor.
La entrada del bucle de corriente es la salida PID del bucle de velocidad, la entrada del bucle de velocidad es la salida PID del bucle de posición y la entrada del bucle de posición es la entrada especificada.
El diagrama de control se ilustra más arriba.
Servomotor de corriente continua sin escobillas:
La fuente de alimentación es CC, que se transforma en CA U/V/W mediante un inversor trifásico interno.
El excitador también emplea una estructura de control de tres bucles (bucle de corriente, bucle de velocidad, bucle de posición), y su principio de control de conducción es el mismo que el descrito anteriormente.
Accionamiento de servomotor de CA:
El sistema puede dividirse en dos módulos separados: el panel de potencia y el panel de control, cada uno con funciones distintas.
El panel de control emite señales PWM a través de un algoritmo correspondiente, sirviendo como circuito de accionamiento de la señal de accionamiento, para modificar la potencia de salida del variador y lograr el control del servomotor de CA síncrono trifásico de imanes permanentes.
La unidad de accionamiento convierte primero la electricidad trifásica de entrada o la electricidad municipal en electricidad de corriente continua a través de un circuito rectificador trifásico de puente completo.
A continuación, el servomotor de CA síncrono trifásico de imanes permanentes es accionado por el conmutador de un inversor trifásico de tensión sinusoidal PWM, tras la rectificación de la electricidad trifásica o municipal.
Este proceso es simplemente una conversión CA-CC-CA.
La unidad de control es el núcleo de todo el servosistema de CA y realiza el control de posición del sistema, el control de velocidad, el control de par y el control de corriente.
Comparación del rendimiento del servomotor y el motor paso a paso
Precisión del control
Cuantas más fases y tiempos tenga un motor paso a paso, mayor será su precisión.
El servomotor obtiene realimentación de su propio codificador, y cuantas más escalas tenga el codificador, mayor será su precisión.
Característica de baja frecuencia
Los motores paso a paso son propensos a vibraciones de baja frecuencia a bajas velocidades.
Para combatirlo, el funcionamiento a baja velocidad suele emplear tecnología de amortiguación o subdivisión.
En cambio, los servomotores funcionan suavemente sin vibraciones, incluso a bajas velocidades.
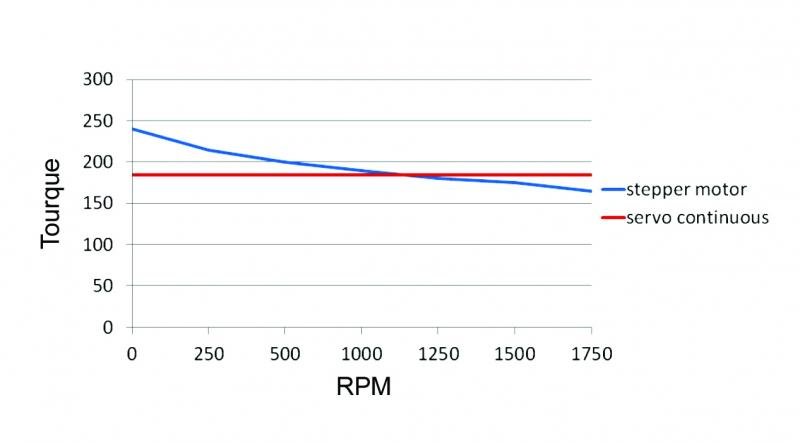
Característica par-frecuencia
El par de salida de un motor paso a paso disminuye con el aumento de la velocidad y cae significativamente a altas velocidades.
En cambio, un servomotor proporciona una salida de par constante a su velocidad nominal y una salida de potencia constante a su velocidad nominal.
Capacidad de sobrecarga
Un motor paso a paso carece de capacidad de sobrecarga, mientras que un servomotor posee una gran capacidad de sobrecarga.
Funcionamiento
Los motores paso a paso funcionan bajo control de bucle abierto, lo que los hace susceptibles de perder el paso o dejar de girar si la frecuencia de arranque es demasiado alta o la carga es demasiado pesada. Si la velocidad es demasiado alta, también puede producirse un rebasamiento.
Por otro lado, el sistema de servoaccionamiento de CA utiliza un control de bucle cerrado. El controlador del servomotor muestrea directamente la señal de realimentación del codificador del motor, formando bucles internos de control de posición y velocidad. Como resultado, es menos probable que los motores paso a paso pierdan el paso o se sobrepasen, lo que hace que el rendimiento del control sea más fiable.
Velocidad Respuesta Rendimiento
Los motores paso a paso tardan cientos de milisegundos en acelerar desde un estado estático hasta la velocidad de funcionamiento.
En comparación, los servosistemas de CA tienen un excelente rendimiento de aceleración, que suele tardar sólo unos milisegundos, lo que los hace adecuados para aplicaciones que requieren arranques y paradas rápidos.