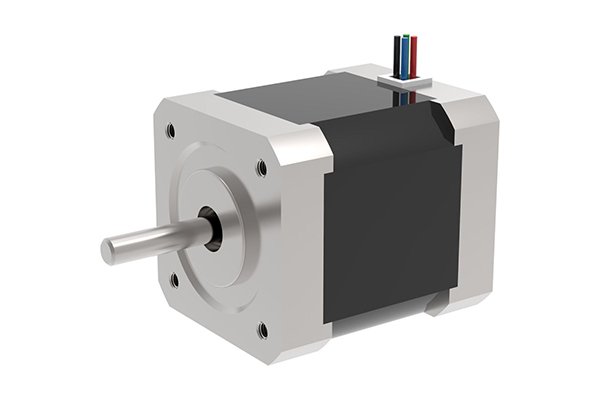
Шаговый двигатель
Принцип работы шагового двигателя
Шаговый двигатель тип двигателя специально разработанный для управления, преобразует электрические импульсы в угловое перемещение.
Когда шаговый драйвер получает импульсный сигнал, он заставляет шаговый двигатель вращаться на заданный фиксированный угол, известный как "угол шага", в указанном направлении.
Двигатель вращается шаг за шагом с фиксированным углом поворота.
Точное позиционирование может быть достигнуто путем управления количеством импульсов, а регулирование скорости и ускорения вращения двигателя - путем управления частотой импульсов.
Изменить направление вращения двигателя можно, изменив последовательность подачи напряжения на обмотки.
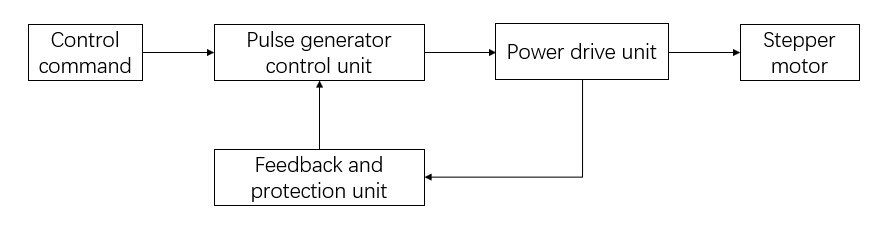
Принцип работы драйвера шагового двигателя
Для работы шагового двигателя требуется специализированный драйвер шагового двигателя. Этот драйвер состоит из блока управления импульсами, блока силового привода и блока защиты.
Блок силового привода усиливает импульсы, генерируемые блоком импульсного управления, и напрямую подключается к шаговому двигателю, выполняя функцию силового интерфейса между шаговым двигателем и микроконтроллером.
Блок управляющих команд принимает сигналы импульса и направления и генерирует набор соответствующих импульсов, которые затем передаются на шаговый двигатель через блок силового привода.
Затем шаговый двигатель поворачивается на заданный угол в указанном направлении.
Шаговый двигатель имеет несколько ключевых технических характеристик, таких как максимальный статический крутящий момент, начальная частота, и рабочая частота.
Как правило, чем меньше угол шага, тем больше максимальный статический момент, а также выше пусковая и рабочая частоты.
Поэтому в режиме работы большое внимание уделяется технологии привода подразделений.
Этот метод улучшает крутящий момент и разрешение шагового двигателя и полностью устраняет низкочастотные колебания.
В результате производительность дисков subdivision превосходит другие типы дисков.
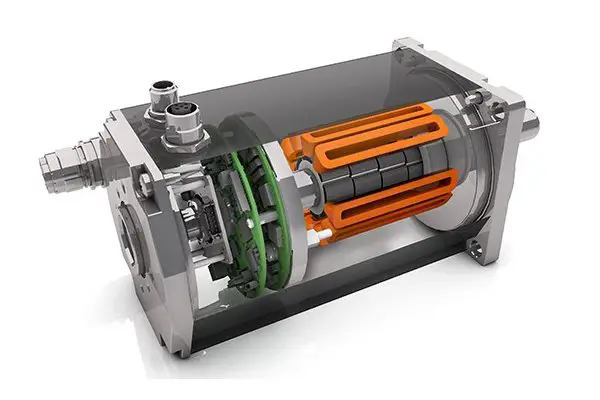
Ротор серводвигателя представляет собой постоянный магнит. Драйвер управляет трехфазным электричеством U/V/W для создания электромагнитного поля, заставляя ротор вращаться под воздействием этого магнитного поля. Собственный энкодер двигателя подает сигналы обратной связи на драйвер, который регулирует угол поворота ротора в зависимости от значения обратной связи и целевого значения.
Серводвигатель
Принцип работы серводвигателя
Серводвигатель, также называемый исполнительным двигателем, используется в качестве исполнительного механизма в системах автоматического управления для преобразования полученных электрических сигналов в угловое перемещение или угловую скорость на валу двигателя.
Серводвигатели бывают двух видов: постоянного и переменного тока.
Когда серводвигатель получает импульс, он поворачивается на соответствующий угол, чтобы произвести перемещение. Это происходит потому, что серводвигатель сам излучает импульсы, причем каждый угол поворота излучает соответствующее количество импульсов, которые образуют замкнутый контур с импульсами, получаемыми серводвигателем.
Это позволяет системе отслеживать количество импульсов, посылаемых на серводвигатель, и количество импульсов, которые он получает, что обеспечивает точное управление и точное позиционирование.
С точки зрения производительности серводвигатели переменного тока превосходят серводвигатели постоянного тока. В серводвигателях переменного тока используется синусоидальное управление, что обеспечивает низкую пульсацию крутящего момента и высокую производительность.
Серводвигатели постоянного тока, с другой стороны, используют управление трапецеидальной волной и имеют относительно низкую производительность.
Однако бесщеточные серводвигатели в серводвигателях постоянного тока работают лучше, чем щеточные серводвигатели.
Принцип работы драйвера серводвигателя
Внутри серводвигателя находится ротор с постоянными магнитами.
Привод управляет трехфазным электричеством U/V/W для создания электромагнитного поля, заставляющего ротор вращаться.
Кроме того, энкодер двигателя подает сигналы обратной связи водителю.
Привод регулирует угол поворота ротора на основе значения обратной связи и желаемого целевого значения.
Щеточный серводвигатель постоянного тока:
Принцип работы двигателя аналогичен стандартному двигателю постоянного тока.
Привод имеет трехконтурную структуру, состоящую из контура тока, контура скорости и контура положения, расположенных в порядке изнутри наружу.
Выход контура тока управляет напряжением якоря двигателя.
Вход контура тока - выход ПИД-контура скорости, вход контура скорости - выход ПИД-контура положения, вход контура положения - указанный вход.
Схема управления показана на рисунке выше.
Бесщеточный серводвигатель постоянного тока:
Источником питания является постоянный ток, который преобразуется в переменный ток U/V/W с помощью внутреннего трехфазного инвертора.
В драйвере также используется трехконтурная структура управления (контур тока, контур скорости, контур положения), а принцип управления движением такой же, как и в предыдущем описании.
Сервопривод переменного тока:
Систему можно разделить на два отдельных модуля: панель питания и панель управления, каждый из которых имеет свои функции.
Панель управления выдает сигналы ШИМ по соответствующему алгоритму, служащему схемой управления для сигнала привода, для изменения выходной мощности инвертора и достижения управления трехфазным синхронным серводвигателем переменного тока с постоянными магнитами.
Сначала блок силового привода преобразует входное трехфазное электричество или городское электричество в электричество постоянного тока через трехфазную полномостовую выпрямительную схему.
Трехфазный синхронный серводвигатель переменного тока с постоянными магнитами приводится в действие коммутатором трехфазного синусоидального инвертора напряжения типа ШИМ после выпрямления трехфазной или городской электроэнергии.
Этот процесс представляет собой простое преобразование AC-DC-AC.
Блок управления является ядром всей сервосистемы переменного тока и выполняет управление положением системы, управление скоростью, управление крутящим моментом и управление током.
Сравнение производительности серводвигателя и шагового двигателя
Точность управления
Чем больше фаз и тактов у шагового двигателя, тем выше его точность.
Серводвигатель получает обратную связь от своего собственного энкодера, и чем больше шкал у энкодера, тем выше его точность.
Низкочастотная характеристика
Шаговые двигатели подвержены низкочастотной вибрации на низких скоростях.
Для борьбы с этим при работе на низких скоростях часто используется технология демпфирования или подразбиения.
В отличие от них, серводвигатели работают плавно и без вибраций даже на низких скоростях.
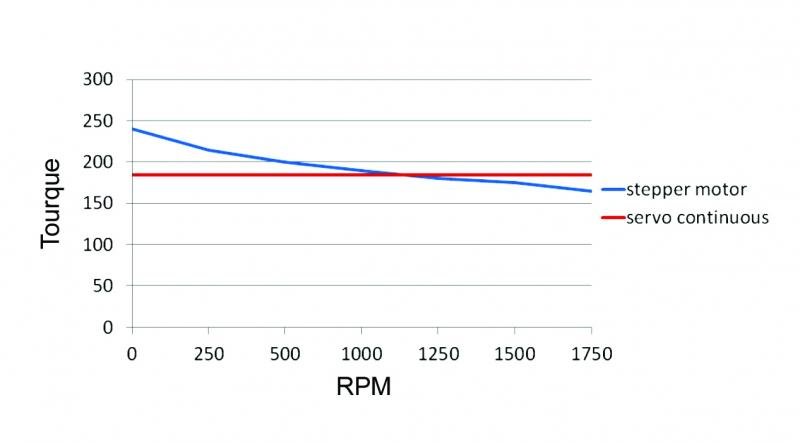
Характеристика крутящего момента
Выходной крутящий момент шагового двигателя уменьшается с увеличением скорости и значительно падает на высоких скоростях.
В отличие от него, серводвигатель обеспечивает постоянный крутящий момент при номинальной скорости и постоянную мощность при номинальной скорости.
Перегрузочная способность
Шаговый двигатель не обладает перегрузочной способностью, в то время как серводвигатель обладает высокой перегрузочной способностью.
Эксплуатационные характеристики
Шаговые двигатели работают в режиме разомкнутого цикла управления, поэтому они могут потерять шаг или прекратить вращение, если частота запуска слишком высока или нагрузка слишком тяжелая. Если скорость слишком высока, это также может привести к перерегулированию.
С другой стороны, в системе сервопривода переменного тока используется замкнутый контур управления. Драйвер серводвигателя напрямую считывает сигнал обратной связи с энкодера двигателя, формируя внутренние контуры управления положением и скоростью. В результате шаговые двигатели менее склонны к потере шага или перерегулированию, что делает их работу более надежной.
Скорость реакции Производительность
Шаговым двигателям требуются сотни миллисекунд, чтобы разогнаться от статического состояния до рабочей скорости.
Для сравнения, сервосистемы переменного тока обладают превосходными характеристиками ускорения, которое обычно занимает всего несколько миллисекунд, что делает их подходящими для приложений, требующих быстрого запуска и остановки.