Imagine a world where objects not only take shape but evolve over time. This is the promise of 4D printing—a revolutionary leap from traditional 3D printing, incorporating time as a transformative dimension. In this article, explore how this cutting-edge technology leverages smart materials to create adaptive, self-assembling structures. From medical stents to space fabrics, 4D printing is set to change the landscape of manufacturing and beyond. Discover the latest advancements and future potential of this fascinating innovation.
In February 2011, Professor Skylar Tibbits, Director of the Self-Assembly Lab at the Massachusetts Institute of Technology (MIT) in the United States, introduced the concept of shaping through material self-assembly during a TED (Technology, Entertainment, Design) talk—a nonprofit organization based in the US.
In 2013, Professor Tibbits returned to the TED stage, presenting the concept of 4D printing to the world for the first time. His talk garnered widespread attention across various industries, recognizing him as the inventor of 4D printing.
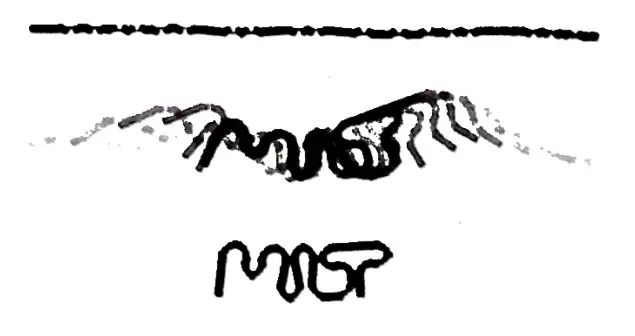
Since then, 4D printing has captured global interest, rapidly advancing in technology and expanding into broader applications. Professor Tibbits and his Self-Assembly Lab, in collaboration with Stratasys, continued research and developed numerous physical models of 4D printing, as shown in Figures 8-1 to 8-4.
Figure 8-1: 4D printing produces a single chain that automatically folds into the letters “MIT.”
Figure 8-2: 4D printing produces a single chain that automatically folds into a certain cube.
Figure 8-3: 4D printing produces several single chains that automatically fold over time into the evolution of a certain three-dimensional structure.
Figure 8-4: 4D printing produces a certain flat structure that automatically folds over time into an octahedron.
Currently, 4D printing technology is still in the exploratory phase and has not yet achieved large-scale production applications.
However, it holds tremendous potential for revolutionizing manufacturing technology, attracting attention from multiple countries around the world, especially the United States and China, with successive research achievements emerging.
In 2011, MIT initiated research into 4D printing technology; in 2014, the American company Nervous System unveiled the first 4D printed hollow dress; in 2017, NASA used 4D printing to create foldable metal weaves, preparing them for use in the manufacturing of various spacecraft; in 2016, an expert team from Xijing Hospital of the Fourth Military Medical University in China, in conjunction with a local national key laboratory, became the first to apply 4D printed tracheal stents in the treatment of infants with complex congenital heart diseases accompanied by severe bilateral tracheal stenosis.
In summary, 4D printing is poised to shift paradigms, expand thinking, and inspire anticipation and excitement for the future.
The concept and implications of 4D printing.
Since Professor Skylar Tibbits first introduced the concept of 4D printing in 2013, the definition has been interpreted by an increasing number of scholars, leading to a variety of descriptions and some debate, without reaching a consensus. It’s worth noting that as 4D printing technology continues to evolve, its conceptual content is also becoming more enriched.
Firstly, this book provides a comprehensive explanation of 4D printing as described by Professor Skylar Tibbits, which is as follows:4D Printing is a new process that demonstrates a radical shift in additive manufacturing. It entails multi-material prints with the capability to transform over time, or a customised material system that can change from one shape to another, directly off the print bed.
This technique offers a streamlined path from idea to reality with performance-driven functionality built directly into the materials.
The fourth dimension is described here as the transformation over time, emphasising that printed structures are no longer simply static, dead objects; rather, they are programmably active and can transform independently.4D Printing is a first glimpse into the world of evolvable materials that can respond to user needs or environmental changes.
At the core of this technology are three key capabilities:the machine, the material and the geometric ‘programme’.
Professor Skylar Tibbits expounds on 4D printing as a fundamentally distinct process from 3D printing (additive manufacturing). 4D printing requires an evolvable multi-material or custom material system that, after being produced by 3D printing, can continue to evolve over time or transform from one shape to another.
By embedding performance-driven features directly into the material system, 4D printing offers a shortcut from concept to reality. The fourth dimension of 4D printing, which can be described as evolution over time, emphasizes that the structures created by 3D printing are no longer static but can be programmed for autonomous transformation.
There are three key technologies in 4D printing: the hardware, the materials, and the geometric “programming.”
To fully grasp the concept of 4D printing as explained by Professor Skylar Tibbits, one must understand the following nuances:
The so-called fourth dimension refers to the evolution of the evolvable material system over time, which according to Professor Tibbits, equates to self-assembly—meaning the material system can change into the desired shape within a set timeframe based on software-defined models.
The fundamental distinction from 3D printing mainly lies in a transformative shift in the manufacturing approach. 3D printing requires a pre-designed three-dimensional model and then uses corresponding materials to shape it, whereas 4D printing embeds the three-dimensional model design directly into the material system, streamlining the process from “design” to “physical object.”
The three key technologies referred to are as follows: For the equipment, conventional 3D printers can typically be used directly or with minor modifications; regarding materials, they are usually multiphase composites or evolvable materials, also known as smart materials or stimulus-responsive materials.
These refer to materials that can autonomously change their physical or chemical properties (including shape, density, color, elasticity, conductivity, optical characteristics, electromagnetic properties, etc.) under predetermined stimuli (such as immersion in water, or exposure to heat, pressure, electricity, light, etc.).
The current focus is primarily on filamentous single chains and sheet-like thin materials, with the next research goal being the creation of more complex three-dimensional structures.
At present, 4D printing is particularly adept at printing filamentous single chains. As for the “geometric programming,” it refers to the response relationship between the material stimuli and physical properties mentioned above, with the primary response mechanism being the generation of localized characteristic strains (or mismatch strains) within the printed object during or after the printing process.
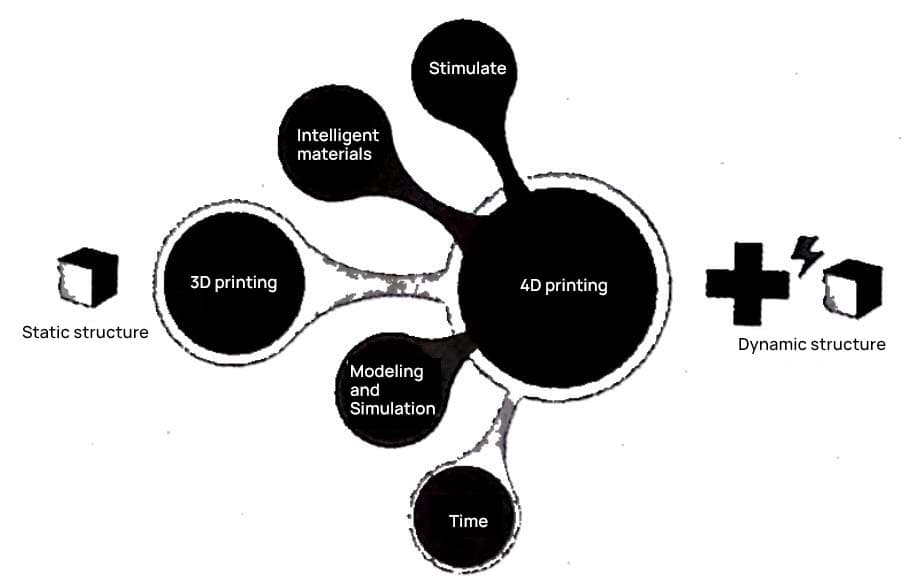
For Professor Skylar Tibbits and his Self-Assembly Lab, the equipment and materials used for 4D printing are provided by Stratasys, while the geometric “programming” is supplied by the research and development team at Autodesk. They have also designed a new software called Cyborg. Figure 8-5 illustrates Professor Skylar Tibbits’s explanation of 4D printing more intuitively.
Figure 8-5 Composition of 4D Printing: 3D printed objects made of smart materials undergo stimulus response over time after modeling and simulation design.
In 2014, Professor Li Dicheng from Xi’an Jiaotong University offered a concise concept of 4D printing: 4D printing refers to the additive manufacturing of smart materials, meaning that structures made from 3D printing technology can change their shape and structure over time when stimulated by external environmental factors. The additional dimension that 4D printing technology adds to 3D printing is time.
Thus, the initial concept of 4D printing can be simply understood as “3D printing + time,” focusing on the shape change of components over time with smart materials. It is believed that as research on 4D printing continues to deepen, its concept and essence will be further elevated.
Materials for 4D Printing
A key component of 4D printing is smart materials. In the late 1980s, inspired by certain capabilities found in nature, American and Japanese scientists first introduced the concept of intelligence to the field of materials and structures, proposing the innovative idea of smart material structures.
Also known as intelligent or responsive structures, these systems integrate sensing elements, actuators, and associated signal processing and control circuits within the material structure. They are designed to respond to mechanical, thermal, optical, chemical, electrical, and magnetic stimuli and control.
These materials are not only capable of bearing loads but also possess the ability to recognize, analyze, process, and control, offering multifunctional features such as self-diagnosis, self-adaptation, self-learning, and self-repair.
Smart material structures represent a cross-disciplinary frontier, encompassing a wide range of fields such as mechanics, materials science, physics, biology, electronics, control science, computer science and technology. A significant number of experts from these disciplines around the world are actively engaged in advancing these fields.
There are numerous classifications for smart materials, which can be broadly categorized based on their function and composition into shape memory materials, electroactive polymers, piezoelectric materials, electrorheological fluids, and magnetostrictive materials, with shape memory materials being the most widely used.
Shape Memory Polymers (SMPs), also known as shape memory polymers, are polymeric materials that can change and fix their initial shape under certain conditions, and then recover their original form upon stimulation by external conditions such as heat, electricity, light, or chemical induction.
SMP technology utilizes modern polymer physics theory, along with polymer synthesis and modification techniques, to molecularly design and adjust the molecular structure of common polymeric materials, such as polyethylene, polyisoprene, polyester, copolyester, polyamide, copolyamide, and polyurethane.
These materials are endowed with a specific shape under certain conditions (the initial state), which can change and be fixed (the deformed state) when external conditions vary. If the external environment changes again in a specific manner, they can reversibly return to the initial state, completing the cycle of memorizing the initial state, fixing the deformed state, and then returning to the initial state.
SMPs are categorized based on the type of stimuli they respond to, including thermally-induced SMPs, electrically-induced SMPs, light-induced SMPs, and chemically-induced SMPs.
Shape Memory Polymer, SMP
Thermally-induced SMPs deform above room temperature and can fix the deformation while storing for extended periods. When heated to a specific response temperature, the components quickly recover their initial shape.
These polymers are widely used in various fields such as healthcare, sports, construction, packaging, automotive, and scientific experiments, including medical devices, foam plastics, seat cushions, optical information storage media, and alarms.
The shape memory function of thermally-induced SMPs primarily originates from two incompatible phases within the material: the fixed phase which retains the shape of the molded product and the reversible phase which undergoes softening and hardening with temperature changes. The fixed phase is responsible for memorizing and recovering the original shape, while the reversible phase allows the product to change shape.
Based on the structural features of the fixed phase, thermally-induced SMPs can be further divided into thermosetting and thermoplastic categories. Additionally, there is a so-called “cold deformation molding” shape memory polymer, which involves cold-processing certain thermoplastic resins below temperature T to achieve high elastic deformation and then cooling to obtain a deformed state.
When reheated above temperature Tg, the material can also return to its original shape.
Electrically-induced SMPs are composites of thermally-induced shape memory polymer materials with conductive substances such as conductive carbon black, metal powder, and conductive polymers. Their memory mechanism is identical to that of thermally-induced shape memory polymers. The composite material uses heat generated from an electric current to raise the system’s temperature and induce shape recovery.
Therefore, it possesses both conductive properties and excellent shape memory functionality, primarily used in electronics, communications, and instrumentation, such as electronic cathode ray tubes and electromagnetic shielding materials.
Photo-responsive SMPs incorporate specific photochromic groups (PCGs) into the polymer’s main and side chains. Upon exposure to UV light, PCGs undergo a photoisomerization reaction, causing a significant change in the molecular chain state.
Macroscopically, the material exhibits a light-induced shape transformation. When the light exposure ceases, the PCGs reversibly react, reverting the molecular state and the material to its original form. Such materials are utilized in printing, optical recording, light-driven molecular valves, and controlled drug release systems.
Chemically-induced SMPs are activated by changes in the surrounding medium to enable material deformation and shape recovery. Common chemical stimuli include pH changes, ion exchange equilibrium, chelation reactions, phase transitions, and redox reactions.
These materials include partially saponified polyacrylamide, polyvinyl alcohol, and polyacrylic acid mixtures in film form, and are used in specialized fields such as separation membranes for proteins or enzymes and chemical engines.
Shape Memory Alloy, SMA
Shape Memory Alloys (SMAs) are materials composed of two or more metal elements that exhibit a shape memory effect (SME) through thermoelastic martensitic phase transformations and their reverse.
SMAs offer the best shape memory performance among shape memory materials. Thermoelastic martensite, once formed, continues to grow as the temperature decreases and diminishes upon heating, disappearing in a completely reversible process. The difference in free energy acts as the driving force for the phase transformation.
SMAs are categorized into three classes based on their deformation characteristics:
One-way shape memory effect: SMAs deform at lower temperatures and recover their original shape upon heating, exhibiting a shape memory effect only during the heating process.
Two-way shape memory effect: Certain alloys recover their high-temperature phase shape upon heating and revert to their low-temperature phase shape upon cooling.
Full shape memory effect: Upon heating, the material recovers its high-temperature phase shape, and upon cooling, it transitions to a low-temperature phase shape with the same geometry but opposite orientation.
To date, more than 50 types of alloys with shape memory effects have been discovered. In 1969, the shape memory effect of nickel-titanium alloy was first applied industrially, leading to the creation of a unique pipe coupling device.
By adding other elements to the nickel-titanium alloy, new nickel-titanium-based shape memory alloys such as nickel-titanium-copper, nickel-titanium-iron, and nickel-titanium-chromium were further developed and researched. In addition, there are other types of shape memory alloys, including copper-nickel, copper-aluminum, copper-zinc, and iron-based alloys (Fe-Mn-Si, Fe-Pd).
SMAs are widely used in various fields such as aerospace, mechanical electronics, biomedical engineering, bridge construction, the automotive industry, and everyday life.
Shape Memory Hydrogels (SMH)
Hydrogels are a type of highly hydrophilic three-dimensional network gel that can rapidly swell in water and retain a significant volume of water without dissolving in its swollen state. The water absorption is closely related to the degree of cross-linking; the higher the cross-linking, the lower the water uptake. Hydrogels can be categorized into traditional hydrogels and environmentally responsive hydrogels based on their response to external stimuli.
Traditional hydrogels are not sensitive to environmental changes such as temperature or pH; they adapt by altering the cross-linking of macromolecules to capture and release water (providing stimulus), thereby achieving shrinkage and expansion to facilitate structural transitions.
Environmentally responsive hydrogels, on the other hand, are capable of detecting minor changes or stimuli in the external environment (such as temperature, pH, light, electricity, pressure, etc.) and responding with significant physical and chemical property changes, even abrupt transformations. The characteristic feature of these hydrogels is the notable change in their swelling behavior in response to environmental factors.
Based on the different response mechanisms of these two types of hydrogels, shape memory hydrogels have been developed and can be used as sensors, control switches, etc.
Shape Memory Ceramics (SMC)
SMCs exhibit shape memory effects that differ from SMPs and SMAs in the following ways: First, SMCs have a smaller deformation capacity; second, SMCs experience varying degrees of irreversible deformation with each shape memory and recovery cycle, and as the number of cycles increases, the cumulative deformation grows, ultimately leading to crack formation.
SMCs can be classified based on the mechanism of shape memory effect generation into viscoelastic shape memory ceramics, martensitic phase transformation shape memory ceramics, ferroelectric shape memory ceramics, and ferromagnetic shape memory ceramics.
Viscoelastic shape memory ceramics include cobalt oxide, aluminum oxide, silicon carbide, silicon nitride, and mica glass ceramics. When these materials are heated to a certain temperature, they are deformed under load, with the external force maintaining the deformation. Upon cooling and subsequent reheating to a specific temperature, the ceramic’s deformation recovers to its original state.
Studies suggest that viscoelastic shape memory ceramics contain two structures—crystalline and glassy—and that the elastic energy driving shape recovery is stored in one of these structures, while deformation occurs in the other.
Martensitic shape memory ceramics, such as ZrO2, BaTiO3, KNbO3, PbTiO3, are employed primarily in energy storage actuator elements and specialized functional materials.
Ferroelectric shape memory ceramics refer to ceramics that exhibit shape memory characteristics when their orientation changes under an external electric field. The phase regions of ferroelectric shape memory ceramics include paraelectric, ferroelectric, and antiferroelectric substances, with phase transition types like paraelectric-ferroelectric and antiferroelectric-ferroelectric transformations.
These phase transitions can be induced by an electric field or by the switching or reorientation of polar magnetic domains. Although ferroelectric shape memory ceramics have smaller deformations compared to shape memory alloys, they boast rapid response times.
They can also undergo reversible transitions such as paramagnetic-ferromagnetic, paramagnetic-antiferromagnetic, or from ordered to disordered orbital states, typically accompanied by recoverable lattice deformations.
Applications of 4D Printing
Objects manufactured through 4D printing are smart products that have adaptive and self-healing capabilities. They are widely applicable in various sectors, including artificial tissues and organs, medical devices, automotive transportation, precision machinery, aerospace, defense industry, as well as in fashion, furniture, and construction. Here are seven specific application examples:
(1) 4D Printed Lattice Dress
Nervous System, established in the United States in 2007 by Jessica and Jessie, both MIT graduates with Jessica holding a degree in architecture from the same institution as Professor Skylar Tibbits, began using a special fabric to create dresses through 4D printing in 2014. The dress, as shown in Figure 8-6, consists of a lattice structure made up of 2,279 triangles and 3,316 hinge points, as illustrated in Figure 8-7.
The tension between the triangles and hinge points adjusts to the wearer’s body shape, ensuring the dress fits well even with changes in weight. Not only does this dress address fitting issues, but it also adapts to the wearer’s body shape. The dress is created using SLS 3D printing technology, leaving un-sintered powder to fall out post-printing, resulting in an interlocking fiber structure.
Nervous System also developed an application that allows users to perform a 3D scan of their body, choose fabric size and shape, and tailor a unique 4D printed dress. Currently, this 4D printed dress is permanently collected by four museums or galleries.
Figure 8-6: 4D Printed Dress
Figure 8-7: Lattice Structure of the 4D Printed Dress
4D-Printed Space Metal Fabric
In 2017, a research team led by Raul Polit Casillas at NASA’s Jet Propulsion Laboratory reported the creation of a foldable metal fabric using 4D printing technology, as shown in Figure 8-8. The fabric features tiny silver metal squares on the front and black woven metal wires on the back, as depicted in Figure 8-9.
This structure significantly enhances its ability to withstand external impacts and is also conveniently designed for application on the surfaces of spacecraft or astronauts’ spacesuits. The structure can reflect light (metal square side) and absorb heat (metal wire side), encompassing five capabilities: physical impact resistance, cloth-like folding ability, steel-like tensile strength, refraction of intense light, and passive thermal management.
Passive thermal management allows the spacecraft to maintain a minimal temperature differential with the external environment, achieving dynamic equilibrium when this material is used as a covering.
NASA anticipates this metal fabric to be utilized in various domains, including foldable and shape-shifting large antennas, thermal insulation for spacecraft visiting cold, icy planets/moons, as well as flexible astronaut isolation mats, miniature meteorite shields for spacecraft, and spacesuits.
Moreover, this innovative material can be used in aircraft on icy moons/planets, creating foldable “feet” that conform to rough planetary surfaces, helping to avoid certain physical damages and facilitating sample collection.
Figure 8-8 Raul Polit Casillas
Figure 8-9 Two-sided structure of the 4D-printed foldable metal fabric
4D-Printed Biodegradable Tracheal Stent
On March 28, 2016, thoracic surgeons at the Tangdu Hospital affiliated with the Fourth Military Medical University used cutting-edge 4D printing technology to alleviate the suffering of a patient with tracheomalacia caused by tracheal endobronchial tuberculosis. The affected tracheal segment exceeded the maximum length permissible for resection, making removal impossible.
Traditional stent implantation could lead to complications like difficulty in expectoration. Internationally, the University of Michigan reported a similar case in The New England Journal of Medicine, where experts designed an external stent suspension for a patient with a left bronchial disease spanning only 1-1.5 cm, whereas this patient had a 6 cm lesion in the trachea, posing a greater challenge.
After careful analysis of the disease characteristics, Dr. Li Xiaofei, Deputy Director Huang Lijun, and Dr. Wang Lei from Tangdu Hospital’s thoracic surgery department, in collaboration with Professor Cao Tiesheng and Physician Yang Guanying from the 3D Printing Research Center of the Fourth Military Medical University, created a 3D-printed tracheal model.
After a thorough assessment, they decided to proceed with the external stent suspension surgery. They also partnered with Professor He Jiankang’s team from Xi’an Jiaotong University to tailor-make a 4D-printed biodegradable tracheal stent for the patient, as shown in Figure 8-10.
Utilizing the 4D-printed biodegradable tracheal stent to encase the weakened trachea and suturing it in place, the collapsed trachea was supported, and the narrowed airway was opened. Thorough preoperative communication with the patient and family was conducted, as illustrated in Figure 8-11. The surgery was a success, and the patient recovered well postoperatively.
The stent’s degradation period can be regulated by controlling the type and molecular weight of the biomaterial, allowing it to gradually degrade and be absorbed by the body over the next 2-3 years, sparing the patient the pain of a second surgery to remove the stent.
Figure 8-11 Preoperative consultation with patient and family, holding the 4D-printed stent
This surgery was the first of its kind internationally, involving the suspension of an external stent for an extremely elongated soft segment of the trachea. Additionally, in September of that year, doctors from the Xijing Hospital of the Fourth Military Medical University teamed up with the He Jiankang team from Xi’an Jiaotong University.
Using a similar 4D-printed absorbable tracheal stent, they performed a stent suspension surgery on a 5-month-old infant suffering from complex congenital heart disease combined with severe bilateral bronchial stenosis, successfully curing the condition—another world first.
4D-Printed SMP Occluders
In 2019, Professor Liu Liwu of Harbin Institute of Technology collaborated with clinical experts from the First Affiliated Hospital of Harbin Medical University to incorporate Fe3O4 magnetic particles into a shape-memory polylactic acid matrix. They designed and 4D-printed a customizable, biodegradable SMP occluder that could be remotely and controllably deployed under a specific magnetic field strength.
They also conducted in vitro feasibility experiments with the 4D-printed SMP occluder to test the simplicity of its deployment process, as shown in Figures 8-12. The SMP occluder could be smoothly packaged, delivered, and released through a catheter, with the deployment process completing within 16 seconds.
Figure 8-12: In vitro feasibility experiments of the 4D-printed SMP occluder
4D-Printed Robotic Self-Assembly Systems
At the IEEE International Conference on Robotics and Automation in 2013, Samuel M. Felton from the Harvard School of Engineering and Applied Sciences’ Institute for Biologically Inspired Engineering showcased a robotic self-assembly system made using 4D-printing technology.
The field of robotics, which demands high structural performance, automation, and intelligence, often sees surprising effects when combining shape-memory polymers, with the robotic self-assembly system being particularly significant. This 4D-printed self-assembly system merges rigid planar materials with SMPs, achieving sequential folding, angle control, and slotting actions upon external stimulation.
Figures 8-13(a) depict a worm-like robot equipped with a 4D-printed robotic self-assembly system, capable of folding into a functional form that moves under adequate electrical current; Figure 8-13(b) shows the same worm-like robot demonstrating its self-propulsion at a speed of 2µm/s. Such self-assembling robots can reduce material, processing, and transportation costs and have promising prospects for exploring confined areas.
Figure 8-13: Applications of 4D-printed robots in the field of robotics
(a) Worm-like robot with 4D-printed robotic self-assembly system (b) Deployed structure and progression diagram of the worm-like robot
(6) 4D-Printed Humidity-Sensitive Sportswear
In 2017, Professor Zhao Xuanhe from the Massachusetts Institute of Technology deposited genetically tractable microbes onto a humidity-inert material using a 3D printing process, creating a biohybrid film with an uneven microbial density multi-layer structure. Utilizing the hygroscopic and bioluminescent behaviors of living cells, this biohybrid film can respond to environmental humidity gradients within seconds.
It reversibly alters the shape of the multi-layer structure and the intensity of bioluminescence, forming open, ventilating flaps in high-humidity settings, as depicted in Figure 8-14. This biohybrid film was fashioned into humidity-sensitive sportswear to enhance the athletic experience, as illustrated in Figure 8-15.
Since the deposition of this multi-layer structure constitutes an additive manufacturing of humidity-sensitive smart materials, this 3D printing process can also be referred to as 4D printing.
Figure 8-14: Multi-layer structure of the biohybrid film deposition
Figure 8-15: Humidity-sensitive sportswear
(7) Large Deformation, High Modulus Self-Transforming Structures
In 2020, Professor H. Jerry Qi’s team at the Georgia Institute of Technology demonstrated a method for designing and manufacturing self-transforming structures capable of large deformations and high modulus. They printed the designed structures using multi-material DIW processes with composite inks consisting of a high volume fraction of solvent, photopolymerizable resins, short glass fibers, and gaseous silica.
During printing, the glass fibers were aligned through shear-induced orientation via the nozzle, resulting in highly anisotropic mechanical properties. The solvent was then evaporated, causing anisotropic shrinkage of the aligned glass fibers in both parallel and perpendicular directions. A subsequent post-curing step further increased the stiffness of the composite material from approximately 300 MPa to about 4.8 GPa.
The printing and deformation process, illustrated in Figure 8-16, is described above. A finite element analysis model was developed to predict the effects of solvent, fiber content, and fiber orientation on shape changes.
The results confirmed that the anisotropic volumetric shrinkage could act as an active hinge, enabling self-transformation of complex structures with large deformation and high modulus. These structures show potential applications in lightweight structures with load-bearing capabilities.
As the founder of MachineMFG, I have dedicated over a decade of my career to the metalworking industry. My extensive experience has allowed me to become an expert in the fields of sheet metal fabrication, machining, mechanical engineering, and machine tools for metals. I am constantly thinking, reading, and writing about these subjects, constantly striving to stay at the forefront of my field. Let my knowledge and expertise be an asset to your business.
Attention all mechanical engineers and manufacturing professionals! Are you struggling with pesky anodizing defects in your aluminum products? Look no further! In this blog post, we'll dive deep into the…
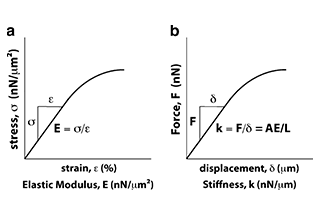
Ever wondered why some materials bend easily while others remain rigid? This blog dives into the fascinating world of elastic modulus and stiffness, unraveling their crucial roles in engineering. By…
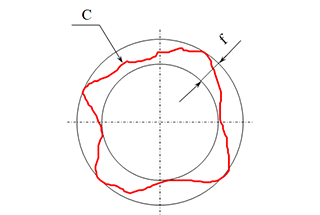
Have you ever wondered what makes a perfect circle? In the world of mechanical engineering, roundness is a crucial concept that affects the performance and longevity of rotating components. This…
In today's fast-paced manufacturing world, efficient deburring is crucial. With numerous methods available, choosing the right one can be daunting. In this blog post, we'll explore various deburring techniques, from…
Have you ever wondered what keeps the world spinning smoothly? The unsung heroes behind the scenes are bearings. These small but mighty components play a crucial role in reducing friction…
Gears are the unsung heroes of the mechanical world, quietly working behind the scenes to keep machines running smoothly. But have you ever wondered what materials these critical components are…
This article explores the top 5 cooling tower manufacturers shaping our world. Learn how these companies innovate to keep industries running smoothly and efficiently. Get ready to uncover the secrets…
Have you ever wondered what keeps our gas systems running smoothly and safely? In this article, we explore top gas regulator manufacturers, uncovering their innovations and contributions to the industry.…
Ever wondered why connecting copper and aluminum wires is problematic? This article explains the risks associated with connecting these two metals due to their differing electrochemical properties, which can lead…